1 DOF joint class for articulated bodyThis provides a 1-DOF joint for articulated body dynamics
More...
#include <taoJoint.h>
|
|
| taoJointDOF1 (taoJointType axis) |
| |
|
taoJointType | getJointType () const |
| |
|
virtual deInt | getDOF () |
| |
|
virtual deVector6 & | getS () |
| |
|
virtual void | reset () |
| |
|
virtual taoVarDOF1 * | getVarDOF1 () |
| |
|
virtual taoVarDOF1 const * | getVarDOF1 () const |
| |
|
virtual void | addQdelta () |
| |
|
virtual void | addDQdelta () |
| |
|
virtual void | zeroTau () |
| |
|
virtual void | zeroDDQ () |
| |
|
virtual void | zeroDQ () |
| |
|
virtual void | zeroQ () |
| |
| virtual void | setTau (const deFloat *v) |
| |
| virtual void | setDDQ (const deFloat *v) |
| |
| virtual void | setDQ (const deFloat *v) |
| |
| virtual void | setQ (const deFloat *v) |
| |
| virtual void | getTau (deFloat *v) const |
| |
| virtual void | getDDQ (deFloat *v) const |
| |
| virtual void | getDQ (deFloat *v) const |
| |
| virtual void | getQ (deFloat *v) const |
| |
|
virtual void | clampDQ () |
| |
|
virtual void | integrate (const deFloat dt) |
| |
| virtual deVector6 & | getJg () const |
| |
| virtual void | getJgColumns (deVector6 *Jg_columns) const |
| |
|
virtual void | setDVar (taoDVar *var) |
| |
|
virtual taoDVar * | getDVar () |
| |
|
virtual taoDVar const * | getDVar () const |
| |
|
void | setType (scl::EJointType t) |
| |
|
scl::EJointType | getType () const |
| |
|
virtual void | setABJoint (taoABJoint *joint)=0 |
| |
|
virtual taoABJoint * | getABJoint ()=0 |
| |
|
virtual taoABJoint const * | getABJoint () const =0 |
| |
|
void | setDQclamp (deInt b) |
| |
|
deInt | getDQclamp () |
| |
|
void | setNext (taoJoint *joint) |
| |
|
taoJoint * | getNext () |
| |
|
virtual void | setDQmax (deFloat dq) |
| |
|
virtual deFloat | getDQmax () |
| |
|
virtual void | setDamping (deFloat d) |
| |
|
virtual deFloat | getDamping () |
| |
|
virtual void | setInertia (deFloat i) |
| |
|
virtual deFloat | getInertia () |
| |
|
virtual void | updateFrameLocal (deFrame *local)=0 |
| |
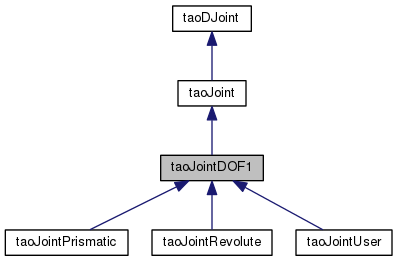
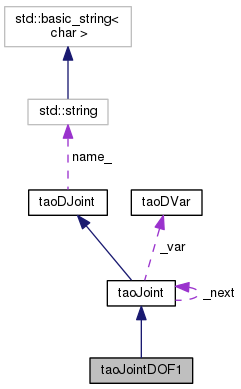
1 DOF joint class for articulated body
This provides a 1-DOF joint for articulated body dynamics
- See Also
- taoJoint, taoJointPrismatic, taoJointRevolute
| virtual void taoJointDOF1::getDDQ |
( |
deFloat * |
v | ) |
const |
|
inlinevirtual |
- Note
- pointer semantics to support more than one DOF
Implements taoJoint.
| virtual void taoJointDOF1::getDQ |
( |
deFloat * |
v | ) |
const |
|
inlinevirtual |
- Note
- pointer semantics to support more than one DOF
Implements taoJoint.
It looks like this method returns the Jacobian contribution of this joint, expressed in the global frame, and with rotations expressed as components around the global coordinate axes.
- Note
- This method looks like a failed attempt at polymorphism – see also taoJointSpherical::getJg() – and is retained for backwards compatibility. You should use getJgColumns() instead.
| void taoJointDOF1::getJgColumns |
( |
deVector6 * |
Jg_columns | ) |
const |
|
virtual |
You need to pass in one deVector6 instance, because DOF1 joints have one degree of (velocity) freedom. Note that getDOF() returns one, so you can use the polymorphic form.
Implements taoJoint.
| virtual void taoJointDOF1::getQ |
( |
deFloat * |
v | ) |
const |
|
inlinevirtual |
- Note
- pointer semantics to support more than one DOF
Implements taoJoint.
| virtual void taoJointDOF1::getTau |
( |
deFloat * |
v | ) |
const |
|
inlinevirtual |
- Note
- pointer semantics to support more than one DOF
Implements taoJoint.
| virtual void taoJointDOF1::setDDQ |
( |
const deFloat * |
v | ) |
|
|
inlinevirtual |
- Note
- pointer semantics to support more than one DOF
Implements taoJoint.
| virtual void taoJointDOF1::setDQ |
( |
const deFloat * |
v | ) |
|
|
inlinevirtual |
- Note
- pointer semantics to support more than one DOF
Implements taoJoint.
| virtual void taoJointDOF1::setQ |
( |
const deFloat * |
v | ) |
|
|
inlinevirtual |
- Note
- pointer semantics to support more than one DOF
Implements taoJoint.
| virtual void taoJointDOF1::setTau |
( |
const deFloat * |
v | ) |
|
|
inlinevirtual |
- Note
- pointer semantics to support more than one DOF
Implements taoJoint.
The documentation for this class was generated from the following files:
- /home/samir/Code/control/scl.git/src/scl/dynamics/tao/tao/dynamics/taoJoint.h
- /home/samir/Code/control/scl.git/src/scl/dynamics/tao/tao/dynamics/taoJoint.cpp
 1.8.6
1.8.6

