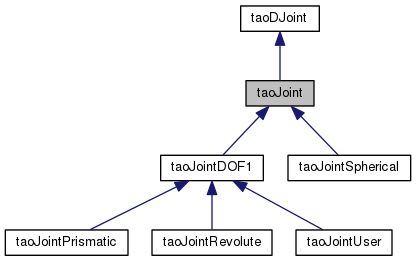
Base joint class for articulated bodyThis provides a joint for articulated body dynamics.
More...
#include <taoJoint.h>
|
| virtual | ~taoJoint () |
| |
|
virtual deInt | getDOF ()=0 |
| |
|
virtual void | reset ()=0 |
| |
|
virtual void | setDVar (taoDVar *var) |
| |
|
virtual taoDVar * | getDVar () |
| |
|
virtual taoDVar const * | getDVar () const |
| |
|
void | setType (scl::EJointType t) |
| |
|
scl::EJointType | getType () const |
| |
|
virtual void | setABJoint (taoABJoint *joint)=0 |
| |
|
virtual taoABJoint * | getABJoint ()=0 |
| |
|
virtual taoABJoint const * | getABJoint () const =0 |
| |
|
void | setDQclamp (deInt b) |
| |
|
deInt | getDQclamp () |
| |
|
void | setNext (taoJoint *joint) |
| |
|
taoJoint * | getNext () |
| |
|
virtual void | setDQmax (deFloat dq) |
| |
|
virtual deFloat | getDQmax () |
| |
|
virtual void | setDamping (deFloat d) |
| |
|
virtual deFloat | getDamping () |
| |
|
virtual void | setInertia (deFloat i) |
| |
|
virtual deFloat | getInertia () |
| |
|
virtual void | clampDQ ()=0 |
| |
|
virtual void | integrate (const deFloat dt)=0 |
| |
|
virtual void | updateFrameLocal (deFrame *local)=0 |
| |
| virtual void | setTau (const deFloat *v)=0 |
| |
|
virtual void | zeroTau ()=0 |
| |
| virtual void | setDDQ (const deFloat *v)=0 |
| |
|
virtual void | zeroDDQ ()=0 |
| |
| virtual void | setDQ (const deFloat *v)=0 |
| |
|
virtual void | zeroDQ ()=0 |
| |
| virtual void | setQ (const deFloat *v)=0 |
| |
|
virtual void | zeroQ ()=0 |
| |
| virtual void | getTau (deFloat *v) const =0 |
| |
| virtual void | getDDQ (deFloat *v) const =0 |
| |
| virtual void | getDQ (deFloat *v) const =0 |
| |
| virtual void | getQ (deFloat *v) const =0 |
| |
| virtual void | getJgColumns (deVector6 *Jg_columns) const =0 |
| |
|
virtual void | addQdelta ()=0 |
| |
|
virtual void | addDQdelta ()=0 |
| |
Base joint class for articulated body
This provides a joint for articulated body dynamics.
Edited 2013-08-21 : Samir Menon smeno.nosp@m.n@st.nosp@m.anfor.nosp@m.d.ed.nosp@m.u
- See Also
- taoDJoint
| virtual void taoJoint::getDDQ |
( |
deFloat * |
v | ) |
const |
|
pure virtual |
| virtual void taoJoint::getDQ |
( |
deFloat * |
v | ) |
const |
|
pure virtual |
| virtual void taoJoint::getJgColumns |
( |
deVector6 * |
Jg_columns | ) |
const |
|
pure virtual |
Retrieve the column(s) of the global Jacobian due to this joint. You have to pass in an array of deVector6 instances, the number of instances must be at least getDOF(), and each of them will be filled with the values of Jg_p (upper three entries) and Jg_w (lower three entries).
- Note
- This method was retrofitted because TAO did not provide a generic method of retrieving the global Jacobian. User were forced to jump through hoops and use dynamic casts, which is error prone and hard to maintain.
Implemented in taoJointDOF1, and taoJointSpherical.
| virtual void taoJoint::getQ |
( |
deFloat * |
v | ) |
const |
|
pure virtual |
| virtual void taoJoint::getTau |
( |
deFloat * |
v | ) |
const |
|
pure virtual |
| virtual void taoJoint::setDDQ |
( |
const deFloat * |
v | ) |
|
|
pure virtual |
| virtual void taoJoint::setDQ |
( |
const deFloat * |
v | ) |
|
|
pure virtual |
| virtual void taoJoint::setQ |
( |
const deFloat * |
v | ) |
|
|
pure virtual |
| virtual void taoJoint::setTau |
( |
const deFloat * |
v | ) |
|
|
pure virtual |
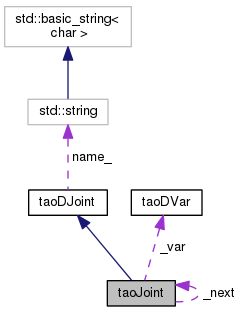
The above var uses a blank super class to create v-table entries for the follwing types: taoVarSpherical* _var_s; taoVarDOF1* _var_dof1;
NOTE TODO: Just remove the _var and use two vars instead.
The documentation for this class was generated from the following files:
- /home/samir/Code/control/scl.git/src/scl/dynamics/tao/tao/dynamics/taoJoint.h
- /home/samir/Code/control/scl.git/src/scl/dynamics/tao/tao/dynamics/taoJoint.cpp
 1.8.6
1.8.6

