|
SCL
1.0
Standard Control Library : Control, dynamics, physics, and simulation
|
|
SCL
1.0
Standard Control Library : Control, dynamics, physics, and simulation
|
#include <SDatabase.hpp>
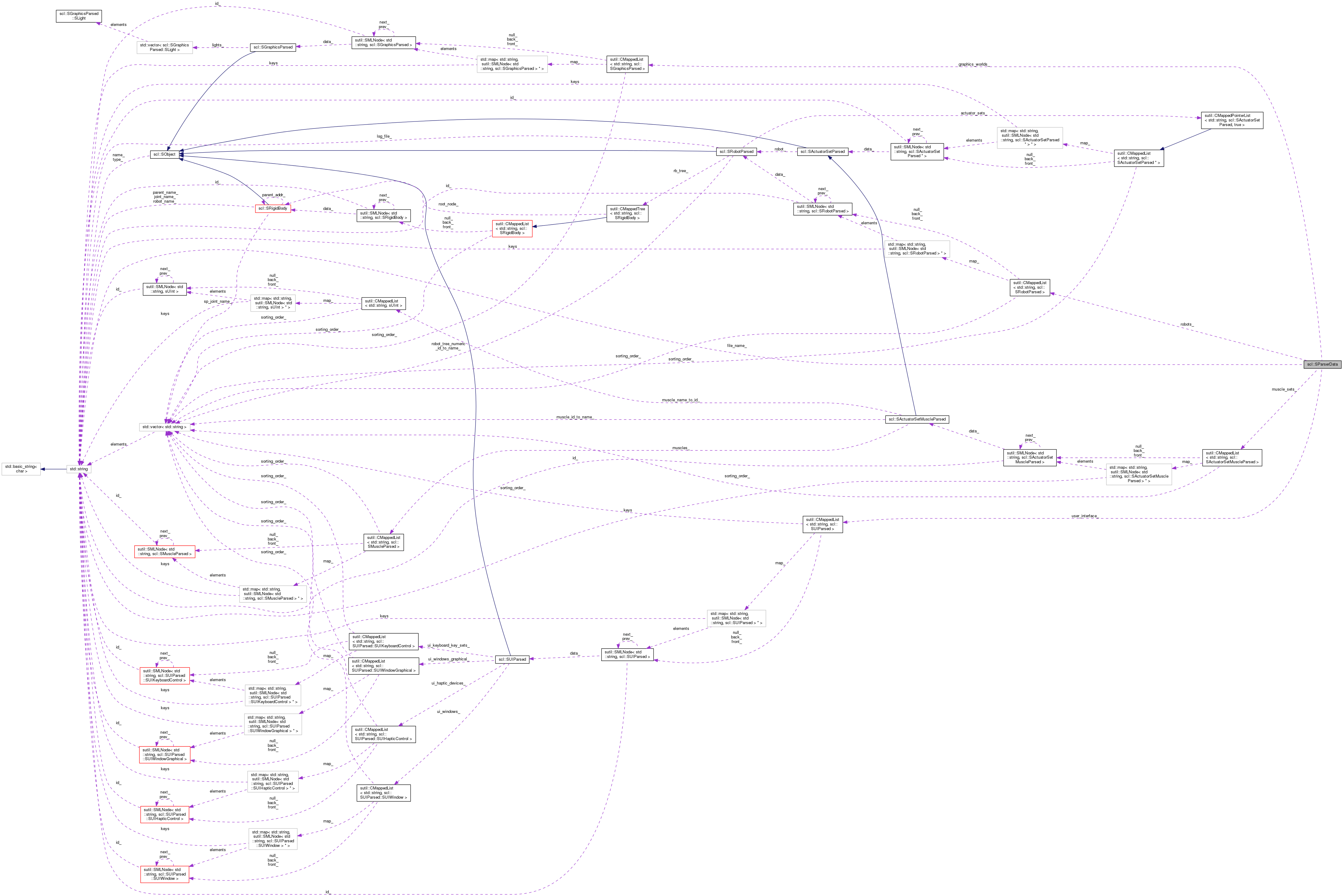
Public Attributes | |
| sutil::CMappedList < std::string, SGraphicsParsed > | graphics_worlds_ |
| sutil::CMappedList < std::string, SRobotParsed > | robots_ |
| sutil::CMappedList < std::string, SActuatorSetMuscleParsed > | muscle_sets_ |
| sutil::CMappedList < std::string, SUIParsed > | user_interface_ |
| std::string | file_name_ |
All the static data required to initialize a robotic simulation.
Supports name based robot data lookup.
| std::string scl::SParserData::file_name_ |
The config file in which the robot and muscle system is specified. This is typically set by a database registration function. NOTE : It is not set in the parser.
| sutil::CMappedList<std::string,SGraphicsParsed> scl::SParserData::graphics_worlds_ |
Contains all the parsed graphics views.
| sutil::CMappedList<std::string,SActuatorSetMuscleParsed> scl::SParserData::muscle_sets_ |
Contains all the parsed muscle systems
NOTE TODO : Muscle systems should be attached to parsed robot specifications. They can't do anything independent of the actual robot spec anyway. The original idea was to allow multiple muscle sets for a robot, but that's overkill. More modular to just redefine the robot as something else and give it a new muscle set.
| sutil::CMappedList<std::string,SRobotParsed> scl::SParserData::robots_ |
Contains all the parsed robots.
| sutil::CMappedList<std::string,SUIParsed> scl::SParserData::user_interface_ |
The parsed gui specification
 1.8.6
1.8.6

