|
SCL
1.0
Standard Control Library : Control, dynamics, physics, and simulation
|
|
SCL
1.0
Standard Control Library : Control, dynamics, physics, and simulation
|
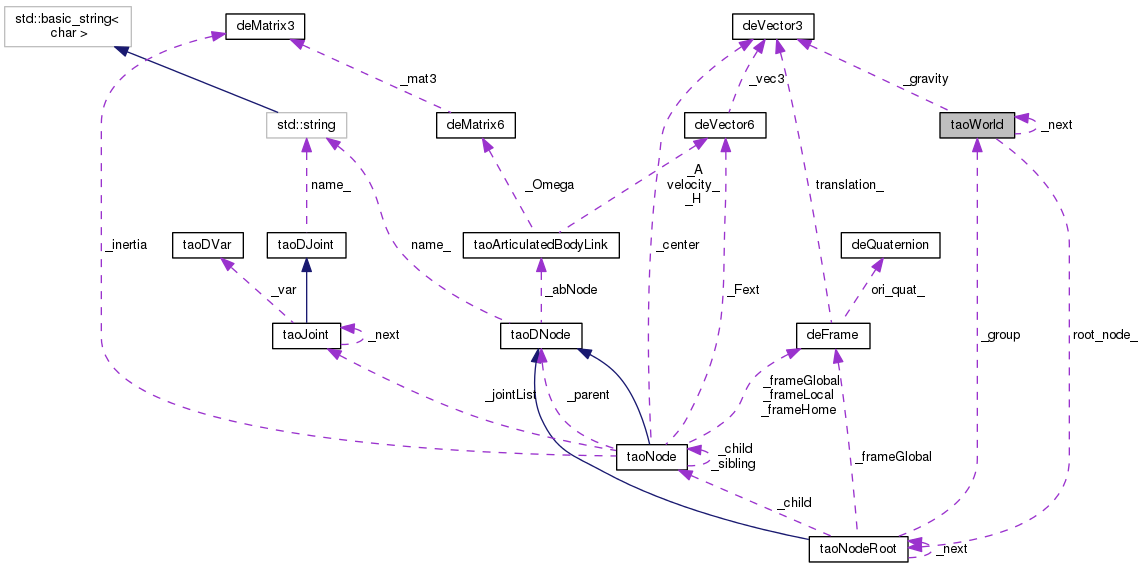
container class to hold dynamics charactersA group is a container object for dynamics characters, particle systems, rigid bodies, and articulated bodies. Characters in different groups can not interact, e.g., no collision between characters from two different groups. All characters in a group share common parameters such as integration time step, gravity, etc. More...
#include <taoWorld.h>
Public Member Functions | |
| ~taoWorld () | |
| void | setID (deInt i) |
| const deInt | getID () const |
| void | setIsFixed (int f) |
| deInt | getIsFixed () |
| deVector3 * | gravity () |
| void | setNext (taoWorld *g) |
| taoWorld * | getNext () |
| taoNodeRoot * | getRootList () |
| void | addRoot (taoNodeRoot *r, const deInt id) |
| taoNodeRoot * | removeRoot (const deInt id) |
| taoNodeRoot * | findRoot (const deInt id) |
| void | update (const deFloat time, const deFloat dt, const deInt n) |
| void | simulate (const deFloat dt) |
| void | updateTransformation () |
| taoNodeRoot * | unlinkFixed (taoNodeRoot *root, taoNode *node) |
| taoNodeRoot * | unlinkFree (taoNodeRoot *root, taoNode *node, deFloat inertia, deFloat damping) |
| void | sync (taoNodeRoot *root, deFloat time) |
Private Attributes | |
| deInt | _id |
| deInt | _isFixed |
| deVector3 | _gravity |
| taoNodeRoot * | root_node_ |
| taoWorld * | _next |
container class to hold dynamics characters
A group is a container object for dynamics characters, particle systems, rigid bodies, and articulated bodies. Characters in different groups can not interact, e.g., no collision between characters from two different groups. All characters in a group share common parameters such as integration time step, gravity, etc.
| taoWorld::~taoWorld | ( | ) |
Edited 2013-08-21 : Samir Menon smenon@stanford.edu
| void taoWorld::update | ( | const deFloat | time, |
| const deFloat | dt, | ||
| const deInt | n | ||
| ) |
 1.8.6
1.8.6

