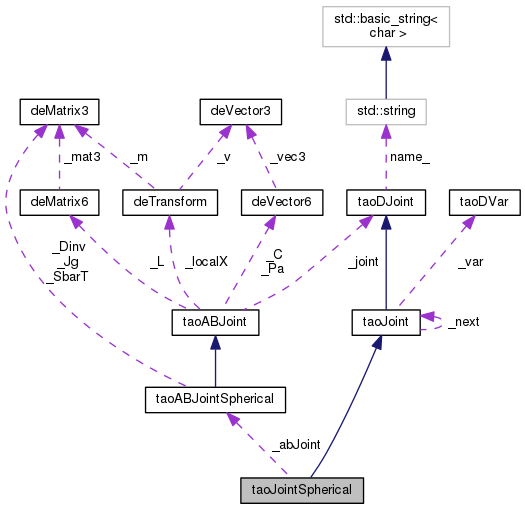
Spherical joint class for articulated bodyThis provides a spherical joint for articulated body dynamics.
More...
#include <taoJoint.h>
|
|
virtual deInt | getDOF () |
| |
|
virtual void | reset () |
| |
|
virtual taoVarSpherical * | getVarSpherical () |
| |
|
virtual taoVarSpherical const * | getVarSpherical () const |
| |
|
virtual void | setABJoint (taoABJoint *joint) |
| |
|
virtual taoABJoint * | getABJoint () |
| |
|
virtual taoABJoint const * | getABJoint () const |
| |
| virtual void | addQdelta () |
| |
|
virtual void | addDQdelta () |
| |
|
virtual void | zeroTau () |
| |
|
virtual void | zeroDDQ () |
| |
|
virtual void | zeroDQ () |
| |
|
virtual void | zeroQ () |
| |
| virtual void | setTau (const deFloat *v) |
| |
| virtual void | setDDQ (const deFloat *v) |
| |
| virtual void | setDQ (const deFloat *v) |
| |
| virtual void | setQ (const deFloat *v) |
| |
| virtual void | getTau (deFloat *v) const |
| |
| virtual void | getDDQ (deFloat *v) const |
| |
| virtual void | getDQ (deFloat *v) const |
| |
| virtual void | getQ (deFloat *v) const |
| |
|
virtual void | clampDQ () |
| |
|
virtual void | integrate (const deFloat dt) |
| |
|
virtual void | updateFrameLocal (deFrame *local) |
| |
| virtual deMatrix3 * | getJg () |
| |
| virtual void | getJgColumns (deVector6 *Jg_columns) const |
| |
|
virtual void | setDVar (taoDVar *var) |
| |
|
virtual taoDVar * | getDVar () |
| |
|
virtual taoDVar const * | getDVar () const |
| |
|
void | setType (scl::EJointType t) |
| |
|
scl::EJointType | getType () const |
| |
|
void | setDQclamp (deInt b) |
| |
|
deInt | getDQclamp () |
| |
|
void | setNext (taoJoint *joint) |
| |
|
taoJoint * | getNext () |
| |
|
virtual void | setDQmax (deFloat dq) |
| |
|
virtual deFloat | getDQmax () |
| |
|
virtual void | setDamping (deFloat d) |
| |
|
virtual deFloat | getDamping () |
| |
|
virtual void | setInertia (deFloat i) |
| |
|
virtual deFloat | getInertia () |
| |
Spherical joint class for articulated body
This provides a spherical joint for articulated body dynamics.
- See Also
- taoJoint
| void taoJointSpherical::addQdelta |
( |
| ) |
|
|
virtual |
Another example of obfuscated code. The one above code probably does the same thing.
Implements taoDJoint.
| virtual void taoJointSpherical::getDDQ |
( |
deFloat * |
v | ) |
const |
|
inlinevirtual |
- Note
- pointer semantics to support more than one DOF
Implements taoJoint.
| virtual void taoJointSpherical::getDQ |
( |
deFloat * |
v | ) |
const |
|
inlinevirtual |
- Note
- pointer semantics to support more than one DOF
Implements taoJoint.
The "documentation" used to say this (whatever that means exactly): "notice that in spherical joints the position components of the Jacobian are zero therefore, to build a 6x3 matrix the upper 3x3 needs to be set to zero and the lower needs to be set the return of this function".
One thing the documentation did not say is that the returned pointer is an array with two elements. getJg()[0] contains something like (I'm still figuring it out from the code...) the contribution of the joint to the translational velocity, and getJg()[0] contains the rotational part, both dependent on whatever frame got passed to taoABJointSpherical::compute_Jg() previously. taoABJointSpherical::compute_Jg() gets called by taoABNodeNOJ1::globalJacobian() or taoABNodeNOJn::globalJacobian(), which get called by taoABDynamics::globalJacobianOut() and taoABDynamics::compute_Jg_Omega_H(), both of which pass taoDNode::frameGlobal() into it (it can get expressed in successively retracted frames though during the iteration over all the joints of a node). taoDynamics::globalJacobian() seems to be the top-level entry point for that chain of calls, so whatever node (and its global frame) you pass to it will be used throughout the recursion.
- Note
- This method is retained mainly for backwards compatibility, you should use getJgColumns() instead, which does the necessary operations to inject the positional components. Looking at the taoJointDOF1 version, by analogy this method probably returns the Jacobian contribution of this joint, expressed in the global frame. Someone chose to return it as a 3x3 matrix because they thought it was neat from the point of view of this class, but it actually makes it hard to polymorphically mix joint types, making it completely pointless to declare this method virtual.
| void taoJointSpherical::getJgColumns |
( |
deVector6 * |
Jg_columns | ) |
const |
|
virtual |
You need to pass in an array of three deVector6 instances, because spherical joints have three degrees of (velocity) freedom. Note that getDOF() returns three, so you can use the polymorphic form.
Implements taoJoint.
| virtual void taoJointSpherical::getQ |
( |
deFloat * |
v | ) |
const |
|
inlinevirtual |
- Note
- pointer semantics to support more than one DOF
Implements taoJoint.
| virtual void taoJointSpherical::getTau |
( |
deFloat * |
v | ) |
const |
|
inlinevirtual |
- Note
- pointer semantics to support more than one DOF
Implements taoJoint.
| virtual void taoJointSpherical::setDDQ |
( |
const deFloat * |
v | ) |
|
|
inlinevirtual |
- Note
- pointer semantics to support more than one DOF
Implements taoJoint.
| virtual void taoJointSpherical::setDQ |
( |
const deFloat * |
v | ) |
|
|
inlinevirtual |
- Note
- pointer semantics to support more than one DOF
Implements taoJoint.
| virtual void taoJointSpherical::setQ |
( |
const deFloat * |
v | ) |
|
|
inlinevirtual |
- Note
- pointer semantics to support more than one DOF
Implements taoJoint.
| virtual void taoJointSpherical::setTau |
( |
const deFloat * |
v | ) |
|
|
inlinevirtual |
- Note
- pointer semantics to support more than one DOF
Implements taoJoint.
The documentation for this class was generated from the following files:
- /home/samir/Code/control/scl.git/src/scl/dynamics/tao/tao/dynamics/taoJoint.h
- /home/samir/Code/control/scl.git/src/scl/dynamics/tao/tao/dynamics/taoJoint.cpp
 1.8.6
1.8.6

