|
SCL
1.0
Standard Control Library : Control, dynamics, physics, and simulation
|
|
SCL
1.0
Standard Control Library : Control, dynamics, physics, and simulation
|
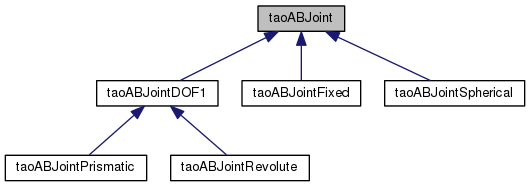
Articulated body joint classThis class provides joint for articulated body. More...
#include <taoABJoint.h>
Public Member Functions | |
| taoABJoint (taoDJoint *joint=NULL) | |
| virtual deVector6 & | C () |
| virtual deVector6 & | Pa () |
| virtual deTransform & | localX () |
| virtual deMatrix6 & | L () |
| virtual void | update_localX (const deTransform &home, const deFrame &localFrame)=0 |
| virtual void | plusEq_SdQ (deVector6 &V)=0 |
| virtual void | plusEq_V_X_SdQ (deVector6 &C, const deVector6 &V)=0 |
| virtual void | compute_Dinv_and_SbarT (const deMatrix6 &Ia)=0 |
| virtual void | minusEq_X_SbarT_St (deMatrix6 &L, const deTransform &localX)=0 |
| virtual void | plusEq_X_SbarT_Tau (deVector6 &Pah, const deTransform &localX)=0 |
| virtual void | compute_ddQ (const deVector6 &Pa, const deVector6 &XAh_C)=0 |
| virtual void | compute_ddQ_zeroTau (const deVector6 &Pa, const deVector6 &XAh_C)=0 |
| virtual void | compute_ddQ_zeroTauPa (const deVector6 &XAh_C)=0 |
| virtual void | compute_Tau (const deVector6 &F)=0 |
| virtual void | plusEq_SddQ (deVector6 &A)=0 |
| virtual void | minusEq_SdQ_damping (deVector6 &B, const deMatrix6 &Ia)=0 |
| virtual void | plusEq_S_Dinv_St (deMatrix6 &Omega)=0 |
| virtual void | compute_Jg (const deTransform &globalX)=0 |
| virtual void | plusEq_Jg_ddQ (deVector6 &Ag)=0 |
| virtual void | add2Tau_JgT_F (const deVector6 &Fg)=0 |
| virtual void | plusEq_S_inertia_ddQ (deVector6 &F, const deVector6 &A)=0 |
| virtual deFloat | getDamping () |
| virtual deFloat | getInertia () |
| virtual taoDVar * | getDVar () |
| virtual void | zeroTau () |
| virtual void | addDQdelta () |
| virtual void | addQdelta () |
Private Attributes | |
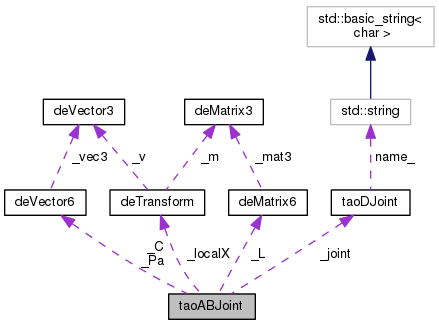
| taoDJoint * | _joint |
| deVector6 | _C |
| deVector6 | _Pa |
| deTransform | _localX |
| deMatrix6 | _L |
Articulated body joint class
This class provides joint for articulated body.
 1.8.6
1.8.6

