|
SCL
1.0
Standard Control Library : Control, dynamics, physics, and simulation
|
|
SCL
1.0
Standard Control Library : Control, dynamics, physics, and simulation
|
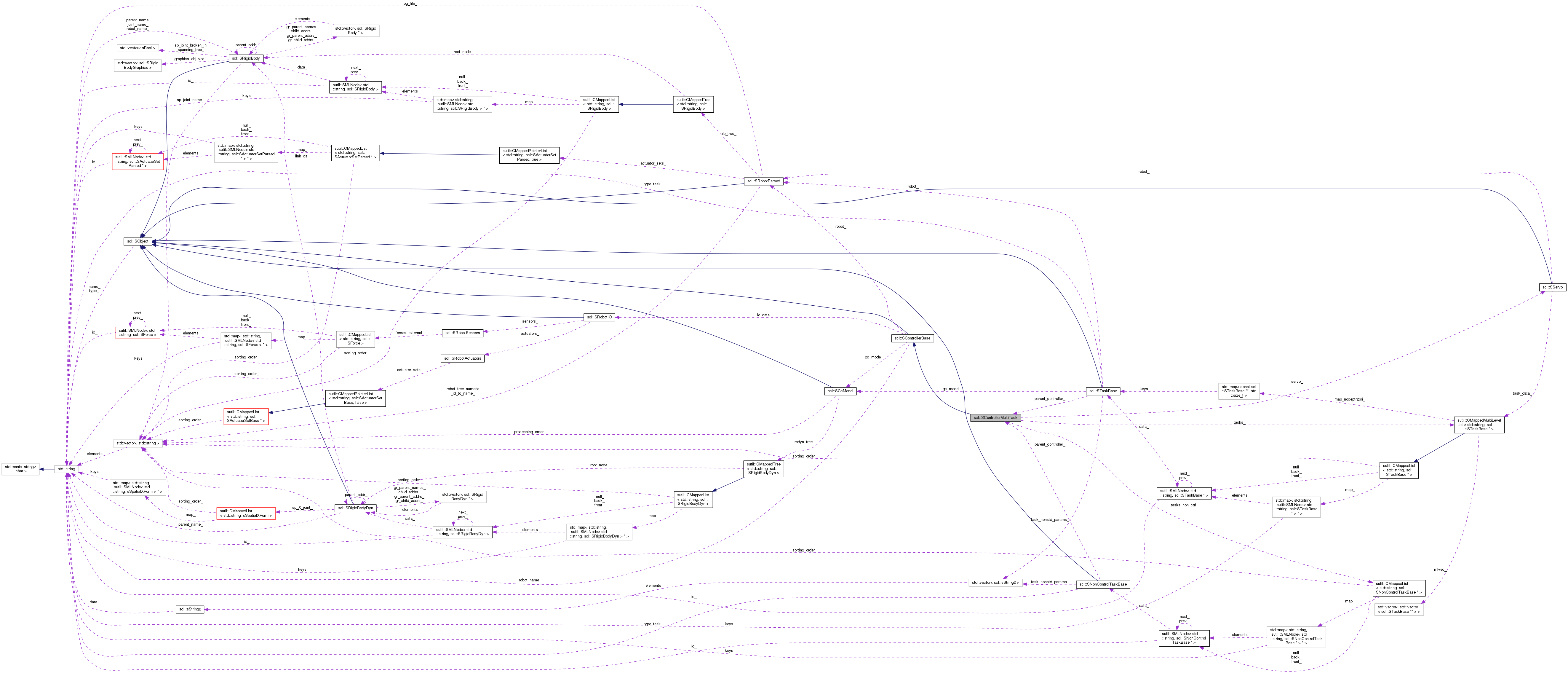
#include <SControllerMultiTask.hpp>
Public Member Functions | |
| SControllerMultiTask () | |
| virtual | ~SControllerMultiTask () |
| virtual sBool | init (const std::string &arg_ctrl_name, const SRobotParsed *arg_robot_ds, SRobotIO *arg_io_data, SGcModel *arg_gc_model=S_NULL) |
| virtual const std::string & | getType () const |
| virtual const std::string & | getName () const |
| virtual bool | hasBeenInit () const |
Public Attributes | |
| SServo | servo_ |
| sutil::CMappedMultiLevelList < std::string, STaskBase * > | tasks_ |
| sutil::CMappedList < std::string, SNonControlTaskBase * > | tasks_non_ctrl_ |
| std::string | robot_name_ |
| const SRobotParsed * | robot_ |
| SRobotIO * | io_data_ |
| SGcModel * | gc_model_ |
| std::string | name_ |
| sBool | has_been_init_ |
Protected Attributes | |
| std::string | type_ |
Controller robot data structure. One such object is stored in the database singleton for every controller.
| scl::SControllerMultiTask::SControllerMultiTask | ( | ) |
Inherited stuff: std::string robot_name_; const SRobotParsed* robot_; SRobotIO* io_data_; SGcModel* gc_model_; std::string name_; sBool has_been_init_; Constructor sets the initialization state to false
|
virtual |
Destructor does nothing. NOTE : Someone else should delete the tasks.
|
inlinevirtualinherited |
Get the object's type
|
inlinevirtualinherited |
Get the object's type
|
inlinevirtualinherited |
Get the object's type
|
virtual |
Initializes the data structure
Reimplemented from scl::SControllerBase.
|
inherited |
Pointer to the JSpace model DS.
|
inherited |
Whether the object is ready for use
|
inherited |
Robot sensor and actuator data
|
inherited |
The object's name
|
inherited |
Pointer to the static robot data (parsed from a file)
|
inherited |
Name of the robot
| SServo scl::SControllerMultiTask::servo_ |
Pointer to the Servo DS.
| sutil::CMappedMultiLevelList<std::string, STaskBase*> scl::SControllerMultiTask::tasks_ |
Pointers to the Task data structures. Organized in the priority order (the outer vector) of the tasks.
Tasks can be accessed either by name (map access), pointer (iterator_) in the multi level pilemap or via the vector (std::vector access)
| sutil::CMappedList<std::string, SNonControlTaskBase*> scl::SControllerMultiTask::tasks_non_ctrl_ |
Pointers to the non-control Task data structures.
Tasks can be accessed either by name (map access) or pointer (iterator_)
|
protectedinherited |
The object's type. Should only be set by the constructor
 1.8.6
1.8.6

