|
SCL
1.0
Standard Control Library : Control, dynamics, physics, and simulation
|
|
SCL
1.0
Standard Control Library : Control, dynamics, physics, and simulation
|
Public Member Functions | |
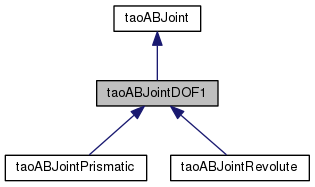
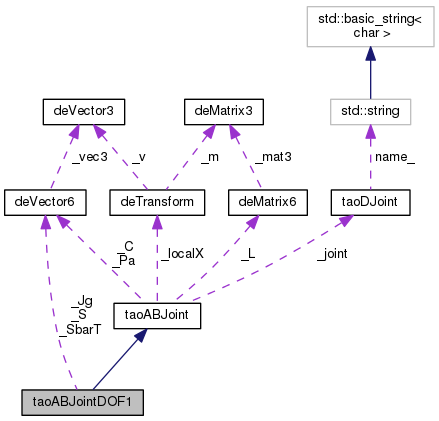
| taoABJointDOF1 (taoDJoint *joint) | |
| virtual void | update_localX (const deTransform &home, const deFrame &localFrame) |
| virtual void | plusEq_SdQ (deVector6 &V) |
| virtual void | plusEq_V_X_SdQ (deVector6 &C, const deVector6 &V) |
| virtual void | compute_Dinv_and_SbarT (const deMatrix6 &Ia) |
| virtual void | minusEq_X_SbarT_St (deMatrix6 &L, const deTransform &localX) |
| virtual void | plusEq_X_SbarT_Tau (deVector6 &Pah, const deTransform &localX) |
| virtual void | compute_ddQ (const deVector6 &Pa, const deVector6 &XAh_C) |
| virtual void | compute_ddQ_zeroTau (const deVector6 &Pa, const deVector6 &XAh_C) |
| virtual void | compute_ddQ_zeroTauPa (const deVector6 &XAh_C) |
| virtual void | compute_Tau (const deVector6 &F) |
| virtual void | plusEq_SddQ (deVector6 &A) |
| virtual void | minusEq_SdQ_damping (deVector6 &B, const deMatrix6 &Ia) |
| virtual void | plusEq_S_Dinv_St (deMatrix6 &Omega) |
| virtual void | compute_Jg (const deTransform &globalX) |
| virtual void | plusEq_Jg_ddQ (deVector6 &Ag) |
| virtual void | add2Tau_JgT_F (const deVector6 &Fg) |
| virtual void | plusEq_S_inertia_ddQ (deVector6 &F, const deVector6 &A) |
| virtual taoVarDOF1 * | getVarDOF1 () |
| virtual deVector6 & | S () |
| virtual deVector6 & | Jg () |
| virtual deVector6 & | C () |
| virtual deVector6 & | Pa () |
| virtual deTransform & | localX () |
| virtual deMatrix6 & | L () |
| virtual deFloat | getDamping () |
| virtual deFloat | getInertia () |
| virtual taoDVar * | getDVar () |
| virtual void | zeroTau () |
| virtual void | addDQdelta () |
| virtual void | addQdelta () |
Private Attributes | |
| deVector6 | _S |
| deVector6 | _SbarT |
| deFloat | _Dinv |
| deVector6 | _Jg |
|
virtual |
Edited 2013-08-21 : Samir Menon smenon@stanford.edu
Implements taoABJoint.
|
private |
The Jacobian column vector corresponding to this joint
|
private |
_S is a selection matrix that consists of a translation and a rotation part. All zeros except the axes moved by this joint. Ie. px : _S[0][0] = 1; // All other entries are zero rz : _S[1][2] = 1; // All other entries are zero
 1.8.6
1.8.6

