Chapter 6
Competitive Learning
In Chapter 5 we showed that multilayer, nonlinear networks are essential for the
solution of many problems. We showed one way, the back propagation of error, that
a system can learn appropriate features for the solution of these difficult
problems. This represents the basic strategy of pattern association—to search out
a representation that will allow the computation of a specified function.
There is a second way to find useful internal features: through the use of a
regularity detector, a device that discovers useful features based on the stimulus
ensemble and some a priori notion of what is important. The competitive
learning mechanism described in PDP:5 is one such regularity detector. In this
section we describe the basic concept of competitive learning, show how
it is implemented in the cl program, describe the basic operations of the
program, and give a few exercises designed to familiarize the reader with these
ideas.
6.1 SIMPLE COMPETITIVE LEARNING
6.1.1 Background
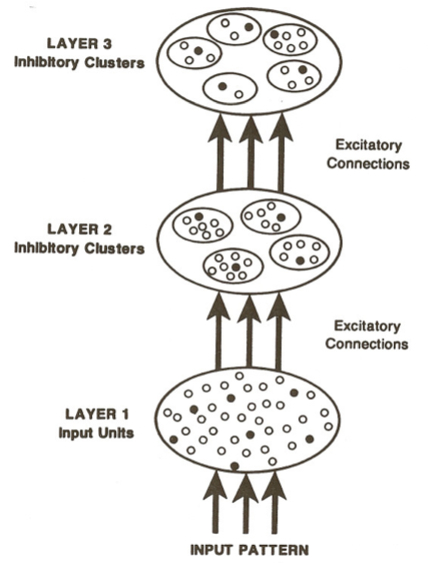
The basic architecture of a competitive learning system (illustrated in Figure 6.1) is a
common one. It consists of a set of hierarchically layered units in which each layer
connects, via excitatory connections, with the layer immediately above it, and has
inhibitory connections to units in its own layer. In the most general case, each unit in
a layer receives an input from each unit in the layer immediately below it and
projects to each unit in the layer immediately above it. Moreover, within a layer, the
units are broken into a set of inhibitory clusters in which all elements within a
cluster inhibit all other elements in the cluster. Thus the elements within a
cluster at one level compete with one another to respond to the pattern
appearing on the layer below. The more strongly any particular unit responds
to an incoming stimulus, the more it shuts down the other members of its
cluster.
There are many variants to the basic competitive learning model. von der
Malsburg (1973), Fukushima (1975), and Grossberg (1976), among others, have
developed competitive learning models. In this section we describe the simplest of the
many variations. The version we describe was first proposed by Grossberg (1976) and
is the one studied by Rumelhart and Zipser (also in PDP:5). This version of
competitive learning has the following properties:
- The units in a given layer are broken into several sets of nonoverlapping
clusters. Each unit within a cluster inhibits every other unit within a
cluster. Within each cluster, the unit receiving the largest input achieves
its maximum value while all other units in the cluster are pushed to their
minimum value.
We have arbitrarily set the maximum value to 1 and the minimum value
to 0.
- Every unit in every cluster receives inputs from all members of the same
set of input units.
- A unit learns if and only if it wins the competition with other units in its
cluster.
- A stimulus pattern Sj consists of a binary pattern in which each element
of the pattern is either active or inactive. An active element is assigned
the value 1 and an inactive element is assigned the value 0.
- Each unit has a fixed amount of weight (all weights are positive) that is
distributed among its input lines. The weight on the line connecting to unit i
on the upper layer from unit j on the lower layer is designated wij. The fixed
total amount of weight for unit j is designated ∑
jwij = 1. A unit learns by
shifting weight from its inactive to its active input lines. If a unit does not
respond to a particular pattern, no learning takes place in that unit. If a
unit wins the competition, then each of its input lines gives up some
portion ϵ of its weight and that weight is then distributed equally
among the active input lines. Mathematically, this learning rule can be
stated
 | (6.1) |
where activejk is equal to 1 if in stimulus pattern Sk, unit j in the lower layer is active
and is zero otherwise, and nactivek is the number of active units in pattern Sk (thus
nactivek = ∑
jactivejk).
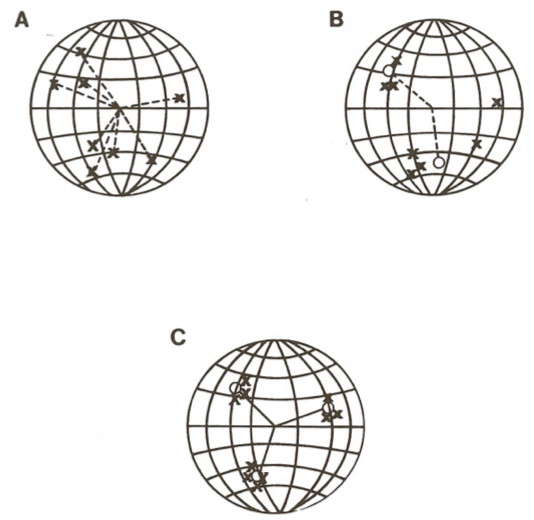
Figure 6.2 illustrates a useful geometric analogy to this system. We can consider
each stimulus pattern as a vector. If all patterns contain the same number of active
lines, then all vectors are the same length and each can be viewed as a point on an
N-dimensional hypersphere, where N is the number of units in the lower level, and
therefore, also the number of input lines received by each unit in the upper level.
Each × in Figure 6.2A represents a particular pattern. Those patterns that are very
similar are near one another on the sphere, and those that are very different are far
from one another on the sphere. Note that since there are N input lines to
each unit in the upper layer, its weights can also be considered a vector in
N-dimensional space. Since all units have the same total quantity of weight, we have
N-dimensional vectors of approximately fixed length for each unit in the
cluster.
Thus, properly scaled, the weights themselves form a set of vectors that
(approximately) fall on the surface of the same hypersphere. In Figure 6.2B, the ○’s
represent the weights of two units superimposed on the same sphere with the
stimulus patterns. Whenever a stimulus pattern is presented, the unit that responds
most strongly is simply the one whose weight vector is nearest that for the stimulus.
The learning rule specifies that whenever a unit wins a competition for a stimulus
pattern, it moves a fraction ϵ of the way from its current location toward the location
of the stimulus pattern on the hypersphere. Suppose that the input patterns fell into
some number, M, of “natural” groupings. Further, suppose that an inhibitory cluster
receiving inputs from these stimuli contained exactly M units (as in Figure
6.2C). After sufficient training, and assuming that the stimulus groupings are
sufficiently distinct, we expect to find one of the vectors for the M units
placed roughly in the center of each of the stimulus groupings. In this case,
the units have come to detect the grouping to which the input patterns
belong. In this sense, they have “discovered” the structure of the input pattern
sets.
6.1.2 Some Features of Competitive Learning
There are several characteristics of a competitive learning mechanism that make it an
interesting candidate for study, for example:
- Each cluster classifies the stimulus set into M groups, one for each unit in
the cluster. Each of the units captures roughly an equal number of stimulus
patterns. It is possible to consider a cluster as forming an M-valued feature
in which every stimulus pattern is classified as having exactly one of the
M possible values of this feature. Thus, a cluster containing two units acts
as a binary feature detector. One element of the cluster responds when a
particular feature is present in the stimulus pattern, otherwise the other
element responds.
- If there is structure in the stimulus patterns, the units will break up the
patterns along structurally relevant lines. Roughly speaking, this means
that the system will find clusters if they are there.
- If the stimuli are highly structured, the classifications are highly stable. If
the stimuli are less well structured, the classifications are more variable,
and a given stimulus pattern will be responded to first by one and then
by another member of the cluster. In our experiments, we started the
weight vectors in random directions and presented the stimuli randomly.
In this case, there is rapid movement as the system reaches a relatively
stable configuration (such as one with a unit roughly in the center of
each cluster of stimulus patterns). These configurations can be more or
less stable. For example, if the stimulus points do not actually fall into
nice clusters, then the configurations will be relatively unstable and the
presentation of each stimulus will modify the pattern of responding so
that the system will undergo continual evolution. On the other hand, if
the stimulus patterns fall rather nicely into clusters, then the system will
become very stable in the sense that the same units will always respond to
the same stimuli.
- The particular grouping done by a particular cluster depends on the
starting value of the weights and the sequence of stimulus patterns actually
presented. A large number of clusters, each receiving inputs from the
same input lines can, in general, classify the inputs into a large number
of different groupings or, alternatively, discover a variety of independent
features present in the stimulus population. This can provide a kind of
distributed representation of the stimulus patterns.
- To a first approximation, the system develops clusters that minimize
within-cluster distance, maximize between-cluster distance, and balance
the number of patterns captured by each cluster. In general, tradeoffs must
be made among these various forces and the system selects one of these
tradeoffs.
6.1.3 Implementation
The competitive learning model is implemented in the cl program. The model
implements a single input (or lower level) layer of units, each connected to all
members of a single output (or upper level) layer of units. The basic strategy for the
cl program is the same as for bp and the other learning programs. Learning occurs as
follows: A pattern is chosen and the pattern of activation specified by the input
pattern is clamped on the input units. Next, the net input into each of the output
units is computed. The output unit with the largest input is determined to be
the winner and its activation value is set to 1. All other units have their
activation values set to 0. The routine that carries out this computation
is
function compute_output()
% intialize the output activation
% ---------------------------------
net.pool(‘output’).activation = zeros(1,noutput);
% compute the netinput for each output unit i
% -------------------------------------------
% ‘netinput’ is a [1 x noutput] array
% ‘weight’ is a [noutput x ninput] matrix
net.pool(‘output’).netinput = net.pool(‘input’).activation * ...
net.pool(‘output’).proj(1).weight’;
% find the winner and set its activation to 1
% --------------------------------------------
[maxnet, winindex] = max(net.pool(‘output’).netinput);
net.pool(‘output’).activation(winindex)=1;
net.pool(‘output’).winner=winindex;
end
After the activation values are determined for each of the output units, the
weights must be adjusted according to the learning rule. This involves increasing
the weights from the active input lines to the winner and decreasing the
weights from the inactive lines to the winner. This routine assumes that
each input pattern sums to 1.0 across units, keeping the total amount of
weight equal to 1.0 for a given output unit. If we do not want to make this
assumption, the routine could easily be modified by implementing Equation 6.1
instead.
function change_weights()
% find the weight vector to be updated (belonging to the winning output unit)
% ------------------------------------------------------------------------
wt = net.pool(‘output’).proj(1).weight(net.pool(‘output’).winner,:);
% adjusting the winner’s weights, assuming that the input
% activation pattern sums to 1
% ---------------------------------------------------------------------
wt = wt + (lrate .* (net.pool(‘input’).activation - wt));
net.pool(‘output’).proj(1).weight(net.pool(‘output’).winner,:) = wt;
end
6.1.4 Overview of Exercises
We provide an exercise for the cl program. It uses the Jets and Sharks data base to
explore the basic characteristics of competitive learning.
Ex6.1. Clustering the Jets and Sharks
The Jets and Sharks data base provides a useful context for studying the clustering
features of competitive learning. There are two scripts, jets2 and jets3, where the 2
or 3 in the name indicates that the network has an output cluster of 2 or 3 units. The
file jets.pat contains the feature specifications for the 27 gang members.
The pattern file is set up as follows: The first column contains the name of
each individual. The next two tell whether the individual is a Shark or a
Jet, the next three columns correspond to the age of the individual, and so
on. Note that there are no inputs corresponding to name units; the name
only serves as a label for the convenience of the user. To run the program
type
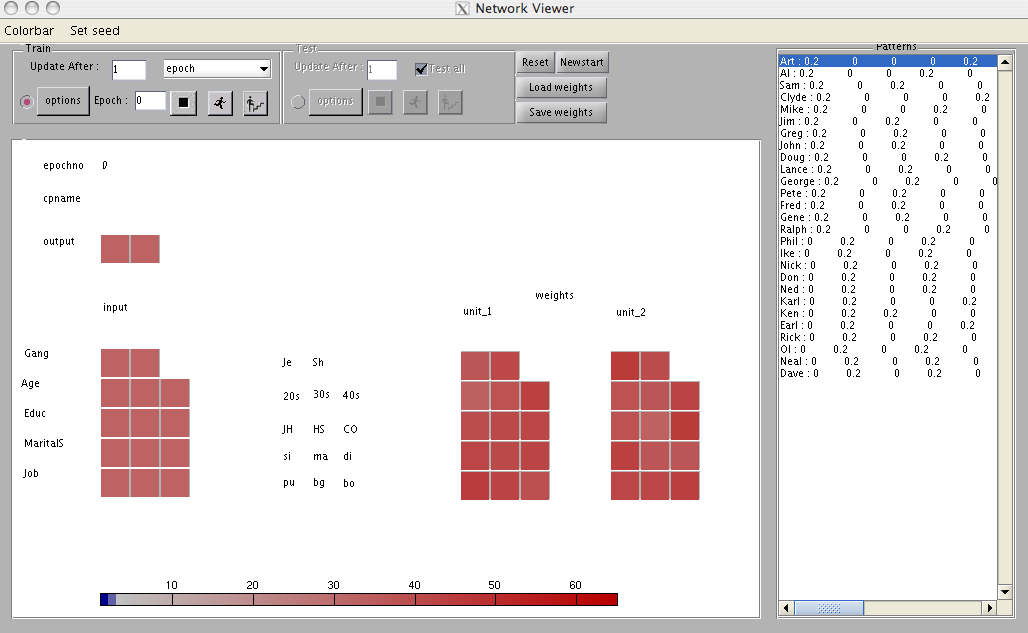
The resulting screen display (shown in Figure 6.3) shows the epoch number, the name of
the current pattern, the output vector, the inputs, and the weights from the input
units to each of the output units. Between the inputs and the weights is a display
indicating the labels of each feature.
The inputs and weights are configured in a manner that mirrors the structure of
the features. In this case, the pattern for Art is the current pattern, and patterns
sum to 1 across the input units. The first row of inputs indicate the gang to which
the individual belongs. In the case of Art, we have a .2 on the left and a 0 on
the right. This represents the fact that Art is a Jet and not a Shark. Note
that there is at most one .2 in each row. This results from the fact that
the values on the various dimensions are mutually exclusive. Art has a .2
for the third value of the Age row, indicating that Art is in his 40s. The
rest of the values are similarly interpreted. The weights are in the same
configuration as the inputs. The corresponding weight value is displayed below each
of the two output unit labels (unit_1 and unit_2). Each cell contains the
weight from the corresponding input unit to that output unit. Thus the upper
left-hand value for the weights is the initial weight from the Jet unit to
output unit 1. Similarly, the lower right-hand value of the weight matrix is the
initial weight from bookie to unit 2. The initial values of the weights are
random, with the constraint that the weights for each unit sum to 1.0. (Due
to scaling and roundoff, the actual values displayed should sum to a value
somewhat less than 1.0.) The lrate parameter is set to 0.05. This means
that on any trial 5% of the winner’s weight is redistributed to the active
lines.
Now try running the program by clicking the run button in the train window.
Since nepochs is set to 20, the system will stop after 20 epochs. Look at the new
values of the weights. Try several more runs, using the newstart command to
reinitialize the system each time. In each case, note the configuration of the weights.
You should find that usually one unit gets about 20% of its weight on the jets
line and none on the sharks line, while the other unit shows the opposite
pattern.
Q.6.1.1.
What does this pattern mean in terms of the system’s response to
each of the separate patterns? Explain why the system usually falls
into this pattern.
Hint.
You can find out how the system responds to each subpattern by
stepping through the set of patterns in test mode — noting each
time which unit wins on that pattern (this is indicated by the output
activation values displayed on the screen).
Q.6.1.2.
Examine the values of the weights in the other rows of the weight
matrix. Explain the pattern of weights in each row. Explain, for
example, why the unit with a large value on the Jet input line has
the largest weight for the 20s value of age, whereas the unit with a
large value on the Shark input line has its largest weight for the 30s
value of the age row.
Now repeat the problem and run it several more times until it reaches a rather
different weight configuration. (This may take several tries.) You might be
able to find such a state faster by reducing lrate to a smaller value, perhaps
0.02.
Q.6.1.3.
Explain this configuration of weights. What principle is the system
now using to classify the input patterns? Why do you suppose
reducing the learning rate makes it easier to find an unusual weight
pattern?
We have prepared a pattern file, called ajets.pat, in which we have deleted explicit
information about which gang the individuals represent. Load this file by going to
Train options / Pattern file and clicking “Load new.” The same should be done for
Test options.
Q.6.1.4.
Repeat the previous experiments using these patterns. Describe and
discuss the differences and similarities.
Thus far the system has used two output units and it therefore classified the
patterns into two classes. We have prepared a version with three output
units. First, close the pdptool windows. Then access the program by the
command:
Q.6.1.5.
Repeat the previous experiments using three output units. Describe
and discuss differences and similarities.
6.2 SELF-ORGANIZING MAP
A simple modification to the competitive learning model gives rise to a powerful new
class of models: the Self-Organizing Map (SOM). These models were pioneered by
Kohonen (1982) and are also referred to as Kohonen Maps.
The SOM can be thought of as the simple competitive learning model with a
neighborhood constraint on the output units. The output units are arranged in a
spatial grid; for instance, 100 output units might form a 10x10 square grid.
Sticking with the hypersphere analogy (Figure 6.2), instead of just moving
the winning output unit weights towards the input pattern, the winning
unit and its neighbors in the grid are adjusted. The amount of adjustment
is determined by the distance in the grid of a given output unit from the
winning unit. The effect of this constraint is that neighboring output units
tend to respond to similar input pattern, producing a topology preserving
map (also called a topographic map) from input space to the output space.
This property can be used to visualize structure in high-dimensional input
data.
6.2.1 The Model
In terms of the architecture illustrated in Figure 6.1, the SOM model presented here
is a layer of input units feeding to a single inhibitory output cluster. Each input unit
has a weighted connection to each output unit. However, both the input units and
the output units are arranged in two-dimensional grids, adding spatial structure to
the network.
Activation of the outputs units is calculated in the much the same way as
the simple competitive learning model, with the addition of the winner’s
spread of activation to neighbors. First, the net input to each output unit is
calculated, and the unit with the largest net input is selected as the winner. The
activations of the units are then set according to the Gaussian in Equation
6.2.
 | (6.2) |
where ox and oy are the grid x and y coordinates of output unit o and σ2 is a spread
parameter. The larger the spread, the further learning spreads to the neighbors
of the winning unit. The total amount of learning remains approximately
constant for different values of σ2, which generally starts off larger and is
reduced so that global order of the map can be established early during
learning.
In contrast to simple competitive learning, all of the network weights are updated
for a given input pattern. The weight wij to output unit i is updated according to
Equation 6.3.
 | (6.3) |
Thus as with simple competitive learning, the output weights are pulled towards the
input pattern. This pull is proportional to the activation of the particular output unit
and the learning rate ϵ.
6.2.2 Some Features of the SOM
- The simple competitive learning algorithm at the beginning of the chapter
was described to cluster input patterns along structurally relevant lines.
If there are clusters in the input patterns, the algorithm will usually find
them. Also, to a first approximation, the algorithm develops clusters that
minimize within-cluster distance, maximize between-cluster distance, and
balance the number of patterns captured by each cluster — striking some
form of tradeoff between these constraints. The SOM still tries to satisfy
these constraints, along with the additional constraint that neighboring
output units should cluster similar types of inputs. Thus, the structure
found by the map not only reflects input clusters but also attempts to
preserve the topology of those clusters.
- In the SOM presented, the net input for an output unit is the inner
product of the input vector and the weight vector, as is common for neural
networks. This type of model is discussed in Hertz et al. (1991). However,
SOMs usually use Euclidean distance between the vectors instead. In this
case, the winning output unit would have the smallest distance from the
input pattern instead of the largest inner product.
- Hertz et al. (1991) provide a useful analogy, describing the SOM as an
“elastic net in input space that wants to come as close as possible to the
inputs; the net has the topology of the output array... and the points of
the net have the weights as coordinates.”
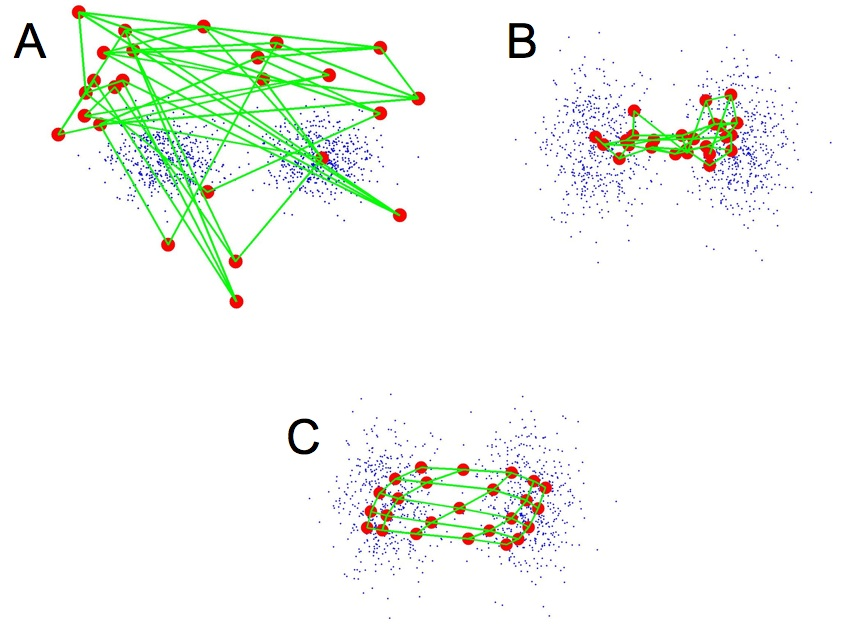
To illustrate this point, a simple simulation was run using the Euclidean
distance version of the SOM. Input patterns were two dimensional, drawn
equally often from one of two circular Gaussians. There was a 5x5 grid
of output units, with the weights initialized randomly in a tangled mess
(Figure 6.4A). After 250 input patterns, the network dragged the output
units towards the patterns, but the network was still a bit tangled and did
not span the input space well (Figure 6.4B). After 1000 input patterns,
the network spread out to cover more of the patterns, partitioning the
output units over the two Gaussians (Figure 6.4C). The “elastic net” was
evidently stretched in the middle, since inputs in this region were very
sparse.
6.2.3 Implementation
The SOM is also implemented in the cl program. Learning is very similar to
simple competitive learning. A pattern is chosen and clamped onto the input
units. Using the same routine as simple competitive learning, the output unit
with the largest net input is chosen as the winner. Unique to the SOM, the
activation of each output unit is set according to the Gaussian function based on
distance from the winner. The routine that carries out this computation
is:
function compute_output()
% same routine as simple competitive learning
% --------------------------------------------
net.pool(‘output’).activation = zeros(1,noutput);
net.pool(‘output’).netinput = net.pool(‘input’).activation * ...
net.pool(‘output’).proj(1).weight’;
[maxnet, winindex] = max(net.pool(‘output’).netinput);
net.pool(‘output’).activation(winindex)=1;
net.pool(‘output’).winner=winindex;
% get the (x,y) coordinate of the winning output
% unit in the grid
% ---------------------------------------------
[xwin, ywin] = ind2sub(net.pool(‘output’).geometry,net.pool(‘output’).winner);
% get the (x,y) coordinates of each output unit in
% the grid, stored in vectors ri and rj
% -------------------------------------------------
[ri,rj]= ind2sub(net.pool(‘output’).geometry,(1:net.pool(‘output’).nunits));
% Gaussian function that distributes activation
% amongst the neighbors of the winner, with
% the spread parameter lrange
% --------------------------------------------
dist = ((xwin - ri) .^ 2 ) + ((ywin - rj) .^ 2);
net.pool(‘output’).activation = exp(-dist ./...
(2*lrange^2));
net.pool(‘output’).activation = net.pool(‘output’).activation ./...
(2*pi*lrange^2);
end
After the activation values are determined for each of the units, the weights are
updated. In contrast with simple competitive learning, not just the winner’s weights
are updated. Each of the output units is pulled towards the input pattern in
proportion to its activation and the learning rate. This is done with the following
routine:
function change_weights()
% get the weight matrix, which has dimensions [noutput x ninput]
% --------------------------------------------------------------------
wt = net.pool(‘output’).proj(1).weight;
% for each output unit, in proportion to the activation of that output unit,
% adjust the weights in the direction of the input pattern
% ---------------------------------------------------------------------
for k =1 :size(wt,1)
wt(k,:) = wt(k,:) + (lrate .* (net.pool(‘output’).activation(k)*...
(net.pool(‘input’).activation - wt(k,:))));
end
net.pool(‘output’).proj(1).weight = wt;
end
6.2.4 Overview of Exercises
We provide an exercise with the SOM in the cl program, showing how the SOM
could be applied as a model of topographic maps in the brain and illustrating some of
the basic properties of SOMs.
Ex6.2. Modeling Hand Representation
There are important topology preserving maps in the brain, such as the map between
the skin surface and the somatosensory cortex. Stimulating neighboring areas on the
skin activate neighboring areas in the cortex, providing a potential application of the
SOM model. In this exercise, we apply the SOM to this mapping, inspired by
Merzenich’s studies of hand representation. Jenkins et al. (1990) studied
reorganization of this mapping (between skin surface and cortex) due to excessive
stimulation. Monkeys were trained to repeatedly place their fingertips on a
spinning, grooved wheel in order to receive food pellets. After many days of such
stimulation, Jenkins et al. found enlargement of the cortical representation of the
stimulated skin areas. Inspired by this result, a simulation was set up in
which:
- Initially quite random (although biased) projections would be organized
by experience to create a smooth and orderly topographic map.
- Concentrating exposure in one part of input space, while receiving input
deprivation in another part of space, would lead to re-organization of the
map. Presumably, the representation will expand in areas of concentrated
input.
To run the software:
- Start MATLAB, make sure the pdptool path is set, and change to the
pdptool/cl directory.
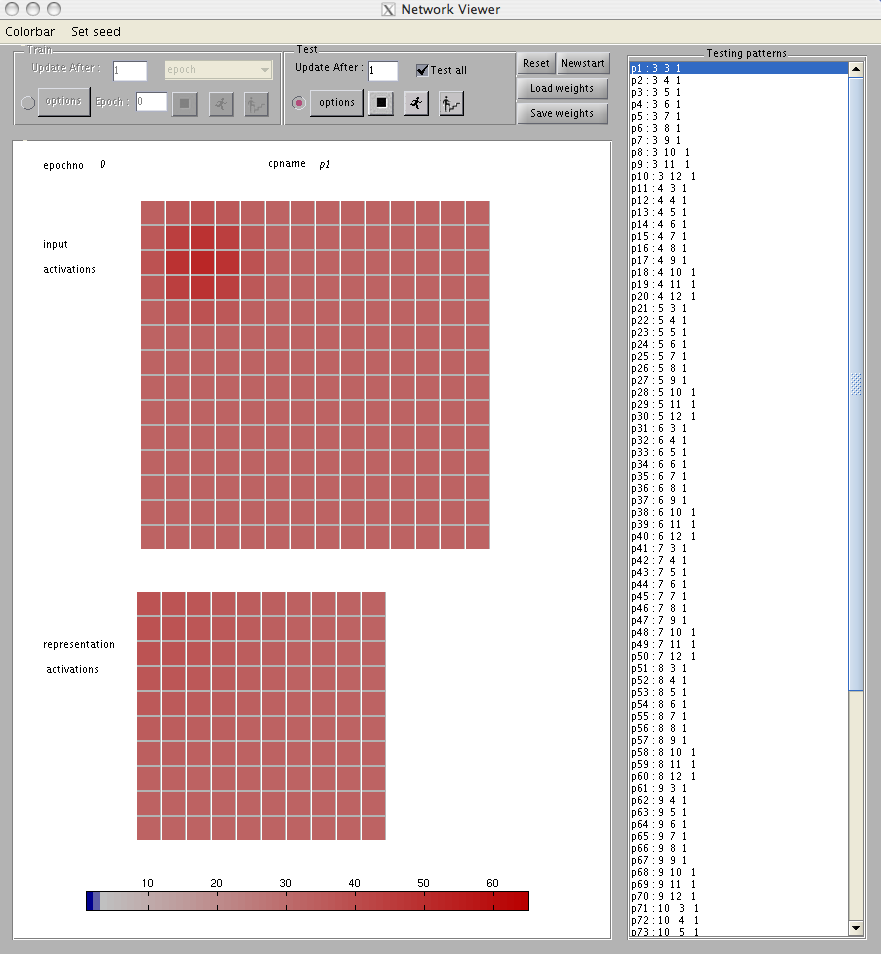
- At the Matlab prompt, type “topo.” This will bring up two square arrays
of units, the upper one representing an input layer (like the skin surface)
and the lower one representing an internal representation (like the cortical
sheet) This window is displayed in Figure 6.5.
- Start by running a test to get your bearings. Note that there are training
and testing windows, train on the left and testing on the right. To test,
click the selector button next to ‘options’ under test. Then select test all
(so that it is checked) and click run.
The program will step through 100 input patterns, each producing a blob of
activity at a point in the input space. The edges of the input space are used only
for the flanks of the blobs, their centers are restricted to a region of 10x10
units. The centers of the blobs will progress across the screen from left to
right, then down one row and across again, etc. In the representation layer
you will see a large blob of activity that will jump around from point to
point based on the relatively random initial weights (more on this in Part
3).
Note that the input patterns are specified in the pattern file with a name, the
letter x, then three numerical entries. The first is the x position on the input grid
(patx), the second is the y position (paty), and the third is a spread parameter (σ),
determining the width (standard deviation) of the Gaussian blob. All spreads have
been set to 1. The activation of an input unit i, at grid coordinates (ix,iy), is
determined by:
 | (6.4) |
which is the same Gaussian function (Equation 6.2) that determines the output
activations, depending on the winning unit’s grid position.
The pool structure of the network is as follows:
Pool(1) is not used in this model.
Pool(2) is the input pool.
Pool(3) is the representation pool.
There is only one projection in the network, net.pool(3).proj(1), which contains the
weights in the network.
Part 1: Training the Network
Now you are ready to try to train the network. First, type “net.pool(3).lrange = 2.8”
in the Command Window, to set the output activation spread to be initially
wide.
To begin training, select the training panel (click the button next to options
under train). The network is set up to run 200 epochs of training, with a learning
rate (lrate) of .1. The “ptrain” mode is set, meaning that you will be training the
network with the patterns presented in a randomly permuted order within each
epoch (each pattern is presented once per epoch). The display will update once per
epoch, showing the last pattern presented in the epoch in the display. You can reduce
the frequency of updating if you like to, say, once per 10 or 20 epochs in the update
after window.
Now if you test again, you may see some order beginning to emerge. That is, as
the input blob progresses across and then down when you run a test all, the
activation blob will also follow the same course. It will probably be jerky and coarse
at the point, and sometimes the map comes out twisted. If it is twisted at this stage
it is probably stuck.
If it is not twisted, you can proceed to refining the map. This is done
by a process akin to annealing, in which you gradually reduce the lrange
variable. A reasonable choice reducing it every 200 epochs of training in the
following increments: 2.8 for the first 200 epochs, 2.1 for the second 200
epochs, 1.4 for the third 200 epochs, and 0.7 for the last 200 epochs. So,
you’ve trained for 200 epochs as lrange = 2.8, so set “net.pool(3).lrange =
2.1.”
Then, run 200 more epochs (just click run) and test again. At this stage the
network seems to favor the edges too much (a problem that lessens but often remains
throughout the rest of training). Then set net.pool(3).lrange to 1.4 at the command
prompt; then run another 200 epochs, then test again, then set it to 0.7, run another
200, then finally test again.
You may or may not have a nice orderly net at this stage. To get a sense of how
orderly, you can log your output in the following manner. In test options, click “write
output” then “set write options.” Click “start new log” and use the name
“part1_log.mat.” Click “Save” and you will return to the set write output
panel. In this panel, go into network variables, click net, it will open, click
pool(3), it will open, click “winner” in pool(3), then click “add.” The line
“pool(3).winner” will then appear under selected. Click “OK.” NOTE: you must also
click OK on the Testing options popup for the log to actually be opened for
use.
Now run a test again. The results will be logged as a vector showing the winners
for each of the 100 input patterns. At the matlab command window you can now
load this information into matlab:
mywinners = load(‘part1_log’);
Then if you type (without forgetting the transpose operator ’):
reshape(mywinners.pool3_winner,10,10)’
you will get a 10x10 array of the integer indexes of the winners in your command
window. The numbers in the array correspond to the winning output unit. The
output unit array (the array of colored squares you see on the gui) is column major,
meaning that you count vertically 1-10 first and then 11 starts from the next column,
so that 1, 11, 21, 31, 41 etc. are on the same horizontal line. In the matrix printed in
your command window, the spatial position corresponds to position of the test
pattern centers. Thus, a perfect map will be numbered down then across such
that it would have 1-10 in the first column, 11-21 in the second column,
etc.
** The above array is your first result. Bring this (in printed form) to class for
discussion. If your results are not perfect, which is quite likely, what is “wrong” with
yours?
NOTE: The log currently stays open and logs all subsequent tests until you shut
it off. To do this, click “test options” / “set write options” / and the click “log status
off.” You should probably start a new log file each time you want to examine the
results, since the contents of the log file will require parsing otherwise. Also
the file will then be available to reload and you can examine its contents
easily.
Part 2: Changing the seed
The results depend, as in the necker cube, on the value of the random seed. Try the
network again with a seed that works pretty well. Go to the very top left of the
network viewer, click “set seed,” enter “211579,” then click ok. Then in the
upper right find “Reset” and click that. Just setting the seed does not reset
the weights. You must click “Reset.” Note that “Reset” resets the system
without changing the seed; if you click “Newstart” you will get a different
seed.
To save time during training, we have provided a script to automate the process
of reducing the lrange parameter. It is provided in “auto_som.m,” and is run by
typing “auto_som” in the command prompt.
After training, save your weights after training, for the purposes of Part 4. To do
this, click on the “Save weights” button in the upper right of the window. You will
load these weights later in this exercise, so remember the folder and name you
chose.
After training, the results should be pretty good. Go through the logging steps
above, call your log file “part2_log.mat,” and display your results.
**The above array is your second result. Bring this also to class for discussion.
Part 3: Topographic bias in the initial weights
The neighborhood function causes the winning output unit and its neighbors to move
their weights in the same direction, developing the property that neighboring output
units respond to similar stimuli. However, for the input grid to align properly with
the output grid, there must be some underlying topographic bias in the
initial weights. Otherwise, the neighborhood function might help create an
orderly response grid, but rotated 90 degrees, twisted, or perhaps worse, a
jumbled mess. We will explore this initial topographic weight bias in this
exercise.
Note that when the network is initialized, the weights are assigned according to
the explanation below:
Create a set of weights, weight_rand(r,i), which are drawn randomly from
a uniform distribution from 0 to 1. Then, normalize the weights such
that
sum(weight_rand(r,:)) = 1
for any output unit r.
Create a set of weights, weight_topo(r,i), such that
weight_topo(r,i) = exp(-d/(2*net.pool(i).proj(j).ispread^2)) ...
./ (2*pi*net.pool(i).proj(j).ispread^2)
where ‘d’ is the distance between unit r and unit i in their respective
grids (aligned such that the middle 10x10 square of the input grid aligns
with the 10x10 output grid). Thus, the weights have a Gaussian
shape, such that the input units connect most strongly with
output units that share a similar position in their respective grids.
Also,
sum(weight_topo(r,:)) = 1 %approximately
due to the Gaussian function.
Then set the initial weights to:
net.pool(3).proj(1).weight(r,i) =
(1. - topbias).* weight_rand(r,i) +
topbias .* weight_topo(r,i);
Note that if topbias is 0 there is no topographic bias at all in the initial weights,
and the weights are random. On the other hand if topbias is 1 the weights
are pre-initialized to have a clear topographic (Gaussian) shape, governed
by standard deviation “ispread” (stands for “initial spread of weights”).
These parameters are associated with net.pool(3).proj(1), and their values
are:
% we make the problem hard initially!
net.pool(3).proj(1).topbias = .1
% One standard deviation of the Gaussian covers 4 units,
% so there’s an initially wide spread of the connections.
net.pool(3).proj(1).ispread = 4
Q.6.2.1.
Set net.pool(3).proj(1).topbias = 1 in the Matlab console and click
“reset,” and then run through the test patterns without any training.
How is the network responding, and why is this the case? Be brief
in your response, and there is no need to log the result.
Q.6.2.2.
Set net.pool(3).proj(1).topbias = 0 in the Matlab console, set the
seed to 211579 (as in Part 2), and click “reset.” Now, run the
standard training regimen (the auto_som.m file). How is the network
responding? Do some adjacent input patterns activate adjacent
response units?
** Bring these printed answers to class.
Part 4: Map reorganization through modified stimulation
The purpose of Part 4 is to demonstrate that after the map reaches a reasonable and
stable organization, the map can be reorganized given a different distribution of
inputs, like the monkey finger tips in Jenkins et al. (1990), with expanded
representation in areas of high stimulation.
In this final part of the homework, a developed map will be selectively stimulated
in the bottom half of the input space, receiving no input in the upper half. This, of
course, is not analogous to the experiment, since the monkeys would also receive
stimulation in other areas of the hand not in contact with the wheel. This exercise
is rather a simplification to suggest how reorganization is possible in the
SOM.
First, load the weights for the trained network that you saved in Part 2. Do this
by clicking the Load weights button and select your saved weights. After
the weights are loaded, do a test cycle to ensure that the map is already
trained.
After this, go into training options. Where it says Pattern file: Click “Load new.”
Select “topo_half.pat.” In case you want to switch the patterns back, topo.pat is the
standard pattern file that you have been using.
Set net.pool(3).lrange = 0.7, and train the network for 400 epochs. After training,
test the network. Changing the patterns before only applies to the training set, and
you will want to change the test patterns as well. Thus, go to test options, and
click “Load New,” and select topo_half.pat. Also, start a new test log as
described in Part 1 and create the log “part4_log.mat.” Test the patterns and
observe how the network now responds to this selected set of lower-half test
patterns. Then type (without forgetting the transpose operator after the second
line):
mywinners = load(‘part4_log’);
reshape(mywinners.pool3_winner,10,5)’
This grid corresponds to only the winners for the bottom 50 input patterns. The
first row was most telling of the reorganization. Compare it with the 6th row of your
saved array from Part 2. The perfect map in Part 2 would have this row numbered 6,
16, 26, …, 96. If the ones digits in the row are numbers other than 6, this would be
indicative of reorganization. Specifically, if the ones digits are 4 or 5, that
means the representation of this input row has creeped upwards, taking over
territory that would previously have responded to the upper half of the
patterns.
** This array is your third result. Bring this also to class for discussion.
NOTE: You can either test with the same patterns you train with, or with the
original set of 100 patterns. The program generally allows different sets of patterns
for training and testing.