|
SCL
1.0
Standard Control Library : Control, dynamics, physics, and simulation
|
|
SCL
1.0
Standard Control Library : Control, dynamics, physics, and simulation
|
#include <SRobotIO.hpp>
Public Attributes | |
| Eigen::VectorXd | q_ |
| Eigen::VectorXd | dq_ |
| Eigen::VectorXd | ddq_ |
| Eigen::VectorXd | force_gc_measured_ |
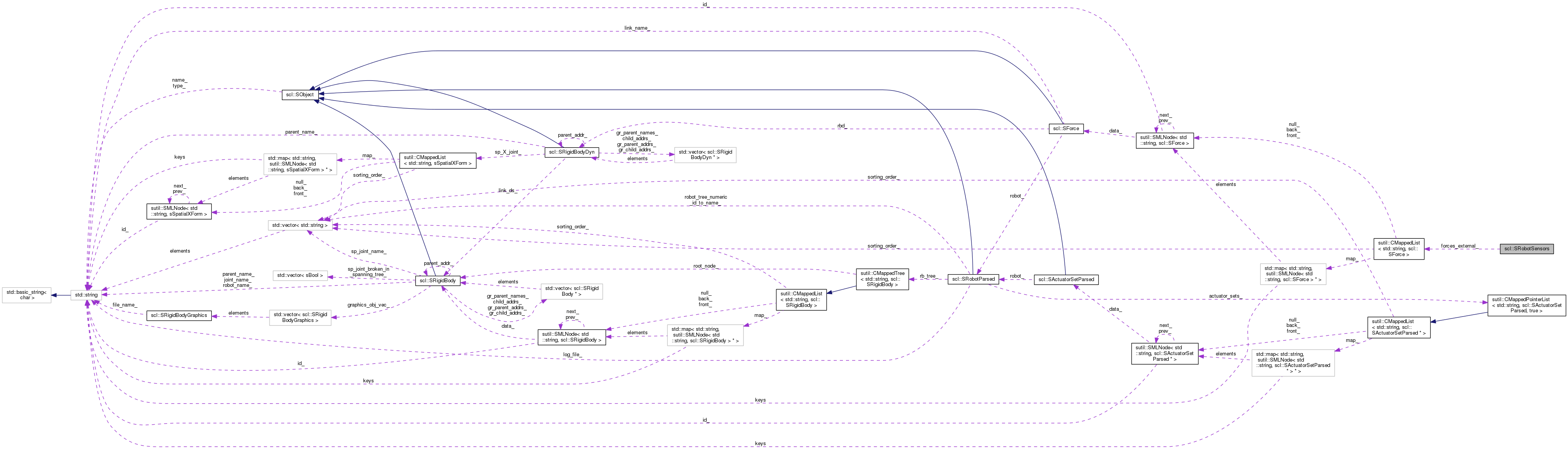
| sutil::CMappedList < std::string, SForce > | forces_external_ |
Contains generic robot sensor information. These are read from the sensors and/or simulation.
| Eigen::VectorXd scl::SRobotSensors::ddq_ |
The sensed generalized accelerations (Eg. joint accelerations)
| Eigen::VectorXd scl::SRobotSensors::dq_ |
The sensed generalized velocities (Eg. joint velocities)
| Eigen::VectorXd scl::SRobotSensors::force_gc_measured_ |
The sensed generalized forces (Eg. joint torques)
| sutil::CMappedList<std::string, SForce> scl::SRobotSensors::forces_external_ |
The external forces applied on the robot. The code expects these to be numerous O(n^k), k>1. These may also appear/disappear frequently: Eg. a) A contact force coming from within the dynamics engine. b) Perturbation forces from wherever.
NOTE : These may change frequently, so it might be a good idea to check for the existence of a particular contact regularly (if you care about it). The standard case will iterate over all in an arbitrary order.
| Eigen::VectorXd scl::SRobotSensors::q_ |
The sensed generalized coordinates (Eg. joint angles)
 1.8.6
1.8.6

