|
SCL
1.0
Standard Control Library : Control, dynamics, physics, and simulation
|
|
SCL
1.0
Standard Control Library : Control, dynamics, physics, and simulation
|
#include <SGraphicsChaiRigidBody.hpp>
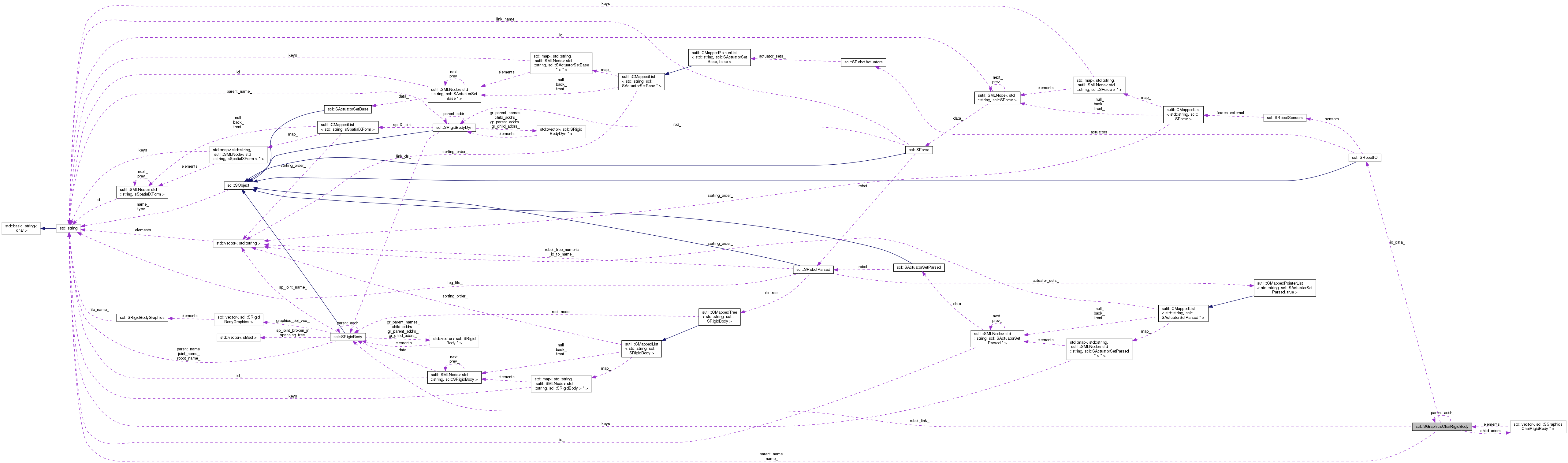
Public Attributes | |
| const SRigidBody * | robot_link_ |
| chai3d::cGenericObject * | graphics_obj_ |
| const SRobotIO * | io_data_ |
| sInt | io_data_idx_ |
| std::string | name_ |
| std::string | parent_name_ |
| SGraphicsChaiRigidBody * | parent_addr_ |
|
std::vector < SGraphicsChaiRigidBody * > | child_addrs_ |
Scl's chai interface uses this to connect scl and chai objects.
This represents a link upon which physics acts.
| std::string scl::SGraphicsChaiRigidBody::name_ |
For Satisfying the branching structure's constraints: a) TIdx name_; b) TIdx parent_name_; c) TNode* parent_addr_; d) std::vector<TNode*> child_addrs_;
 1.8.6
1.8.6

