|
SCL
1.0
Standard Control Library : Control, dynamics, physics, and simulation
|
|
SCL
1.0
Standard Control Library : Control, dynamics, physics, and simulation
|
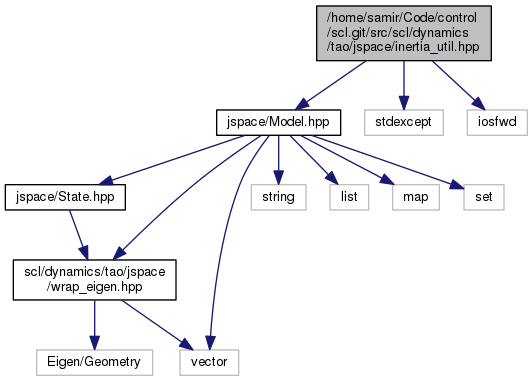
Go to the source code of this file.
Functions | |
| void | jspace::inertia_parallel_axis_transform (double in_ixx, double in_ixy, double in_ixz, double in_iyy, double in_iyz, double in_izz, double trans_x, double trans_y, double trans_z, double mass, double &out_ixx, double &out_ixy, double &out_ixz, double &out_iyy, double &out_iyz, double &out_izz) |
| void | jspace::inertia_parallel_axis_transform (deMatrix3 const &in_inertia, deVector3 const &translation, double mass, deMatrix3 &out_inertia) |
| void | jspace::inertia_similarity_transform (double in_ixx, double in_ixy, double in_ixz, double in_iyy, double in_iyz, double in_izz, double rot_qx, double rot_qy, double rot_qz, double rot_qw, double &out_ixx, double &out_ixy, double &out_ixz, double &out_iyy, double &out_iyz, double &out_izz) |
| void | jspace::inertia_similarity_transform (double in_ixx, double in_ixy, double in_ixz, double in_iyy, double in_iyz, double in_izz, deQuaternion const &rotation, deMatrix3 &out_inertia) |
| void | jspace::inertia_similarity_transform (deMatrix3 const &in_inertia, deQuaternion const &rotation, deMatrix3 &out_inertia) |
| void | jspace::fuse_mass_properties (double orig_mass, deMatrix3 const &orig_inertia, deFrame const &orig_com, double adtl_mass, deMatrix3 const &adtl_inertia, deFrame const &adtl_com, deFrame const &home_of_adtl_wrt_orig, double &fused_mass, deMatrix3 &fused_inertia, deFrame &fused_com) |
| void | jspace::fuse_mass_properties (deMassProp &original, deMassProp &additional, deFrame const &home_of_additional_wrt_original, deMassProp &fused) |
| void | jspace::mass_inertia_explicit_form (Model const &model, Eigen::MatrixXd &mass_inertia, std::ostream *dbgos) throw (std::runtime_error) |
 1.8.6
1.8.6

