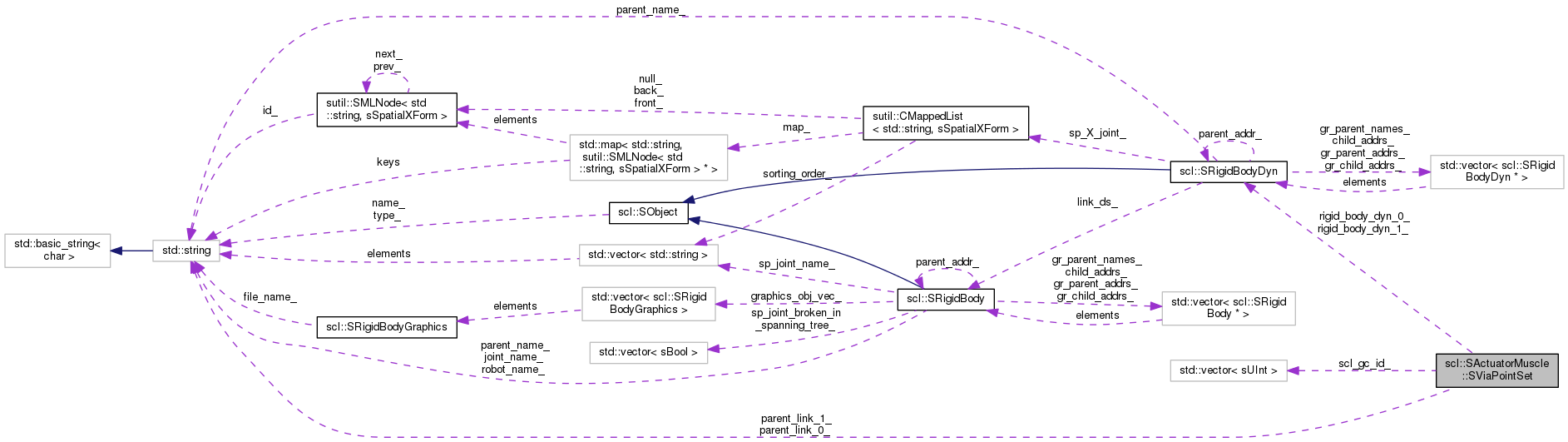
| scl::SActuatorMuscle::SViaPointSet::SViaPointSet |
( |
| ) |
|
|
inline |
Default constructor. Sets stuff to null
| int scl::SActuatorMuscle::SViaPointSet::child_link_id_ |
Child link in branching representation = {0,1}
| bool scl::SActuatorMuscle::SViaPointSet::is_root_0_ |
Is one of the links root.
| Eigen::MatrixXd scl::SActuatorMuscle::SViaPointSet::J_0_ |
The Jacobians at the via points
| std::string scl::SActuatorMuscle::SViaPointSet::parent_link_0_ |
The two parent links to which the points are attached
| Eigen::Vector3d scl::SActuatorMuscle::SViaPointSet::pos_in_parent_0_ |
The two via points that span one or more generalized coords
| const SRigidBodyDyn* scl::SActuatorMuscle::SViaPointSet::rigid_body_dyn_0_ |
The generalized coordinate spanned. This determines the columns of the Jacobian that we will pay attention to. Only the actuated gc columns are relevant while computing the muscle Jacobian.
| std::vector<sUInt> scl::SActuatorMuscle::SViaPointSet::scl_gc_id_ |
The generalized coordinate spanned. This determines the columns of the Jacobian that we will pay attention to. Only the actuated gc columns are relevant while computing the muscle Jacobian.
| Eigen::Vector3d scl::SActuatorMuscle::SViaPointSet::x_glob_0_ |
The two via points that span one or more generalized coords (in global coordinates)
The documentation for this class was generated from the following file:
 1.8.6
1.8.6

