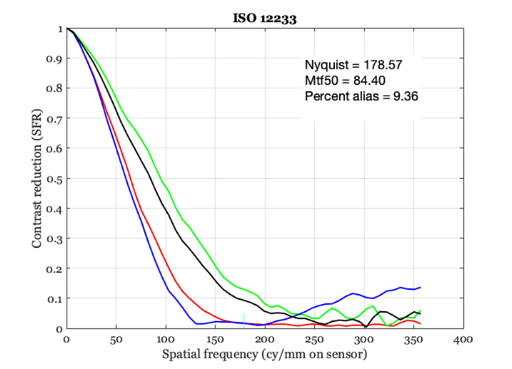
Evaluating an infrared camera MTF
Calculate the ISO12233 MTF the slanted edge target.
This is a long (and older) version of the more calculation illustrated in s_metricsMTFSlantedBar.
The processing steps illustrated are
- Create a slanted bar scene with infrared data
- Convert the scene to an optical image
- Create a sensor with 7 bands and a random spatial CFA and compute the virtual camera image
- Interactively select the rectangular region and store it
- Compute the MTF of the slanted edge target for this sensor and spatial CFA
See also: sceneCreate, ieReadColorFilter, ieRect2Locs, vcGetROIData, ISO12233
Copyright ImagEval Consultants, LLC, 2010
Contents
- First, create a slanted bar image. Make the slope some uneven value
- Create an optical image with some default optics.
- Create sensor
- Create and set the processor window
- Define the rect for the ISO12233 calculation
- Calculate an MTF when you choose the rectangle
- Compare what happens when we place an IR blocking filter in the path
- Compute the MTF with the rectangle selected automatically
- END
ieInit
First, create a slanted bar image. Make the slope some uneven value
sz = 512; %Row and col samples slope = 7/3; meanL = 100; % cd/m2 viewD = 1; % Viewing distance (m) fov = 5; % Horizontal field of view (deg) wave = 400:4:1068; scene = sceneCreate('slantedBar',sz,slope,fov,wave); % Now we will set the parameters of these various objects. % First, let's set the scene field of view. scene = sceneAdjustLuminance(scene,meanL); % Candelas/m2 scene = sceneSet(scene,'distance',viewD); % meters scene = sceneSet(scene,'fov',fov); % Field of view in degrees % sceneWindow(scene);
Create an optical image with some default optics.
oi = oiCreate('diffraction limited'); fNumber = 4; oi = oiSet(oi,'optics fnumber',fNumber); % Now, compute the optical image from this scene and the current optical % image properties oi = oiCompute(oi,scene); % oiWindow(oi);
Create sensor
% Build a default sensor sensor = sensorCreate; wave = sceneGet(scene,'wave'); [filterSpectra,allNames] = ieReadColorFilter(wave,'NikonD200IR.mat'); % This is a way to make artificial color filters, each with a Gaussian % sensitivity profile. % nSensors = 7; minW = 450; maxW = 800; % cPos = linspace(minW,maxW,nSensors); % width = ones(size(cPos))*(cPos(2)-cPos(1))/2; cfType = 'gaussian'; % filterSpectra = sensorColorFilter(cfType, wave, cPos, width); % allNames = {'b1','g1','r1','x1','i1','z1','i2'}; % Spatial layout is 3x3 for seven sensor case. % p = [ 1 2 3; 4 5 6; 7 7 7]; % sensor = sensorSet(sensor,'pattern and size',p); % sensorShowCFA(sensor); nSensors = length(allNames); filterNames = cell(1,nSensors); for ii=1:nSensors, filterNames{ii} = allNames{ii}; end % ieNewGraphWin; plot(wave,filterSpectra) % Adjusting the wavelength requires updating several fields - the % sensor, the pixel, the photodetector QE, and the infrared % filter. The pixel wave is updated automatically, but it is % necessary to also update the infrared and photodetector QE - sensor = sensorSet(sensor,'wave',wave); sensor = sensorSet(sensor,'filterSpectra',filterSpectra); sensor = sensorSet(sensor,'filterNames',filterNames); sensor = sensorSet(sensor,'ir filter',ones(size(wave))); % ieNewGraphWin; plot(wave,sensorGet(sensor,'irFilter')) pixel = sensorGet(sensor,'pixel'); pixel = pixelSet(pixel,'pd spectral qe',ones(size(wave))); sensor = sensorSet(sensor,'pixel',pixel); % ieNewGraphWin; plot(wave,pixelGet(pixel,'pd spectral qe')) % Match the sensor size to the scene FOV. Also matches the CFA size to the % sensor (I think). sensor = sensorSetSizeToFOV(sensor,sceneGet(scene,'fov'),oi); % Compute the image and bring it up. sensor = sensorCompute(sensor,oi); % sensorWindow(sensor); % Plot a couple of lines % sensorPlotLine(sensor,'h','volts','space',[1,80]); % sensorPlotLine(sensor,'h','volts','space',[1,81]);
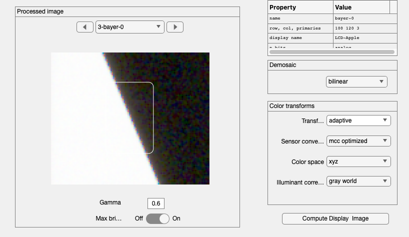
Create and set the processor window
ip = ipCreate; ip = ipSet(ip,'scale display',1); ip = ipSet(ip,'render Gamma',0.6); % Use the linear transformation derived from sensor space (above) to % display the RGB image in the processor window. ip = ipSet(ip,'conversion method sensor ','MCC Optimized'); ip = ipSet(ip,'correction method illuminant ','Gray World');% ip = ipSet(ip,'internal CS','XYZ'); % First, compute with the default properties. This uses bilinear % demosaicing, no color conversion or balancing. The sensor RGB % values are simply set to the display RGB values. ip = ipCompute(ip,sensor); ipWindow(ip);
Define the rect for the ISO12233 calculation
% Have the user select the edge. masterRect = [39 25 51 65]; % This changed around December 2023. Not sure why. Probably some % object changed size? (BW) % Then it changed back. % masterRect = [166 82 226 303]; % It is also possible to estimate the rectangle automatically using % ISOFindSlantedBar, which is called in ieISO12233()
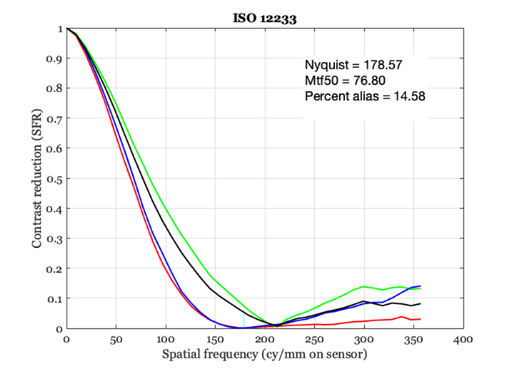
Calculate an MTF when you choose the rectangle
roiLocs = ieRect2Locs(masterRect); % BUG HERE barImage = vcGetROIData(ip,roiLocs,'results'); c = masterRect(3)+1; r = masterRect(4)+1; barImage = reshape(barImage,r,c,3); %{ ieNewGraphWin; imagesc(barImage(:,:,1)); axis image; colormap(gray(64)); %} dxmm = sensorGet(sensor,'pixel width','mm'); % Run the ISO 12233 code. The results are stored in the window. ISO12233(barImage, dxmm);
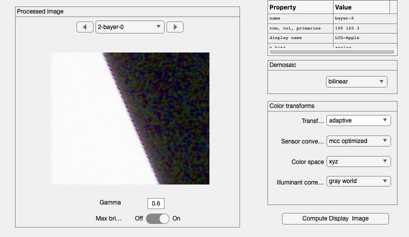
Compare what happens when we place an IR blocking filter in the path
[irFilter,irName] = ieReadColorFilter(wave,'IRBlocking'); % ieNewGraphWin; plot(wave,irFilter); sensor = sensorSet(sensor,'ir filter',irFilter); sensor = sensorCompute(sensor,oi); ieAddObject(sensor);
Compute the MTF with the rectangle selected automatically
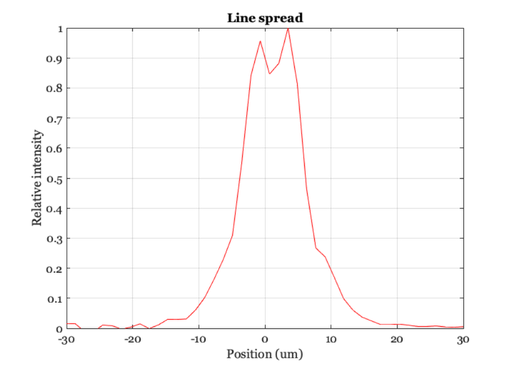
ip = ipCompute(ip,sensor); % Compute the MTF and the Linespread function mtf = ieISO12233(ip); ieNewGraphWin; mtf.lsfx = mtf.lsfx*1000; % Convert to microns plot(mtf.lsfx, mtf.lsf); xlabel('Position (um)'); ylabel('Relative intensity'); title('Line spread'); grid on; dxum = dxmm*1000; mxmn = 30; set(gca,'xlim',[-mxmn mxmn],'ylim',[0 1]); % Inserted 2023.12.28 assert(abs(mtf.mtf50 - 77) <= 3); ipWindow(ip); h = ieDrawShape(ip,'rectangle',mtf.rect);
Using selected sensor No black border detected