Compute the acutance of a camera object.
To simplify the code we often use the camera object to keep track of the different objects. It has slots for optics (oi) and the sensor and the image processor (ip).
The acutance metric depends on the optics and sensor, but not the image processing steps.
See also: cameraCreate, cameraMTF, ISOAcutance, s_metricsColorAccuracy
Copyright ImagEval Consultants, LLC, 2012.
Contents
ieInit
Initialize the virtual camera.
% We illustrate the process at first by starting with the defaults. camera = cameraCreate; camera = cameraSet(camera,'sensor auto exposure',true); camera = cameraSet(camera,'optics fnumber',4);
Camera from default oi,sensor and ip
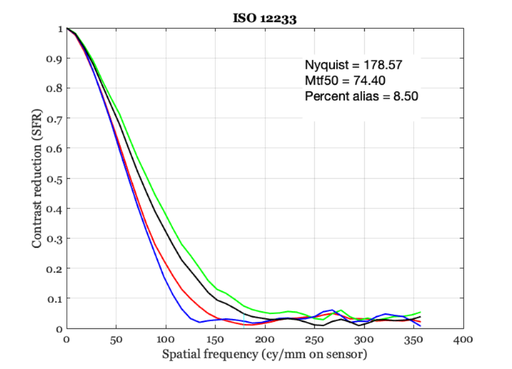
Slanted edge MTF test
cMTF = cameraMTF(camera); % This is the MTF in cpd for the luminance lumMTF = cMTF.mtf(:,4); % ieAddObject(cMTF.vci); ipWindow
No black border detected
Compute acutance
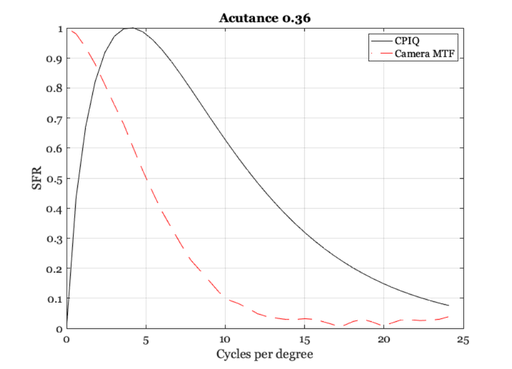
% cycles/mm is the default for the ISO12233 MTF. We would like to compute % cy/deg, which is related by cpd = (cycles/mm) *(1/degPerMM) % For the sensor, degrees is related to distance on the sensor with respect % to the focal distance to the optics. oi = cameraGet(camera,'oi'); degPerMM = cameraGet(camera,'sensor h deg per distance','mm',[],oi); cpd = cMTF.freq / degPerMM; % The CPIQ is a representation of someone's idea of the human contrast % sensitivity function. The camera MTF is a representation of what the % camera sees. To compute acutance we need the cpiq and the camera MTF. % Here, we plot the MTF and the cpiq, and then we calculate the acutance % inside the function below. We put this in the title of the figure. vcNewGraphWin; cpiq = cpiqCSF(cpd); plot(cpd, cpiq, '-k', cpd, lumMTF,'--r'); grid on; hold on; xlabel('Cycles per degree'); ylabel('SFR'); % Acutance is an ISO Standard. Acutance = ISOAcutance(cpd,lumMTF); title(sprintf('Acutance %.2f',Acutance)) legend('CPIQ','Camera MTF')