Contents
Illuminant correction
Calculate illuminant correction matrices for a surface reflectance chart and collection of illuminants. Each matrix converts the data obtained under a test illuminant into an estimate of the sensor data under a standard illuminant (D65 in this case).
One could then transform the sensor data into a standard space such as XYZ, assuming that we know the illuminant (D65).
N.B. There are still some edits to come for the part at the end.
See also:
% Copyright ImagEval Consultants, LLC, 2016
ieInit
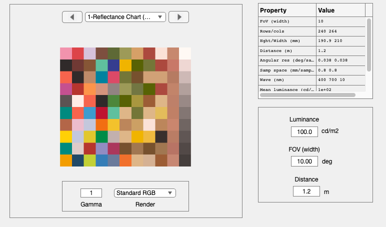
Create the N-100 reflectance chart
Alternatively, you can choose the scene surface reflectances here this way, if you want.
Choose some example reflectance data sFiles = cell(1,2); sFiles{1} = fullfile(isetRootPath,'data','surfaces','reflectances','MunsellSamples_Vhrel.mat'); sFiles{2} = fullfile(isetRootPath,'data','surfaces','reflectances','Food_Vhrel.mat');
% Row and column size for the reflectance chart sSamples = [48 16];
% Spatial samples for each square patch pSize = 20;
% Create the scene, storing the specific surface samples (sSamples) [scene, sSamples] = sceneReflectanceChart(sFiles,sSamples,pSize); scene = sceneSet(scene,'name','surface chart');
scene = sceneCreate('reflectance chart');
ieAddObject(scene); sceneWindow;
Create an oi and a sensor
oi = oiCreate; % Set the sensor of interest here nikon = sensorCreate; wave = sensorGet(nikon,'wave'); % Load up Nikon color filters and an infrared nikon = sensorSet(nikon,'infrared',ieReadSpectra('infrared2',wave)); nikon = sensorSet(nikon,'color filters',ieReadSpectra('NikonD70',wave)); nikon = sensorSetSizeToFOV(nikon,sceneGet(scene,'fov'),oi);
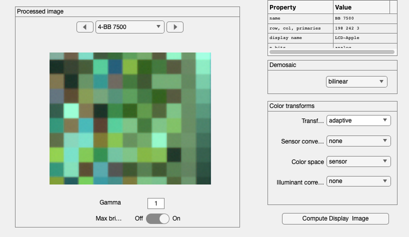
Display the scene over a range of blackbody illuminants
bbodyList = (3000:1500:7500); nIlluminant = length(bbodyList); oIP = ipCreate; % We could put in a transform selected by imageSensorCorrection % oVci = ipSet(oVci,'color conversion transform',VAL); % oVci = ipSet(oVci,'Sensor Correction Method','mcc optimized'); % oVci = ipSet(oVci,'Illuminant Correction Method','gray world'); % oVci = ipSet(oVci,'Internal CS','XYZ'); oIP = ipSet(oIP,'Transform method','adaptive'); oIP = ipSet(oIP,'conversion method Sensor ','none'); oIP = ipSet(oIP,'correction method Illuminant ','none'); oIP = ipSet(oIP,'Internal CS','sensor'); % Adjust the scene illuminant SPD and compute a series of rendered images. vci = cell(1,nIlluminant); for ii=1:nIlluminant scene = sceneAdjustIlluminant(scene,blackbody(wave,bbodyList(ii),'energy')); scene = sceneAdjustLuminance(scene,100); scene = sceneSet(scene,'name',sprintf('surface %.1f',bbodyList(ii))); ieAddObject(scene); % sceneWindow; oi = oiCompute(oi,scene); ieAddObject(oi); % oiWindow; nikon = sensorCompute(nikon,oi); ieAddObject(nikon); % sensorWindow; vci{ii} = ipCompute(oIP,nikon); vci{ii} = ipSet(vci{ii},'name',sprintf('BB %d',bbodyList(ii))); ieAddObject(vci{ii}); end ipWindow;
Now put in the transform method
IN PROGRESS