This notebook demonstrates how to run the inference of PPN (Point Proposal Network). The goal is to predict the starting / ending points of tracks and showers. For each point we predict a 3D position, a score and a type (one of 5 types: HIP, MIP, shower, delta, or michel).
The most recent code for PPN is available on the branch develop of Temigo/lartpc_mlreco3d.
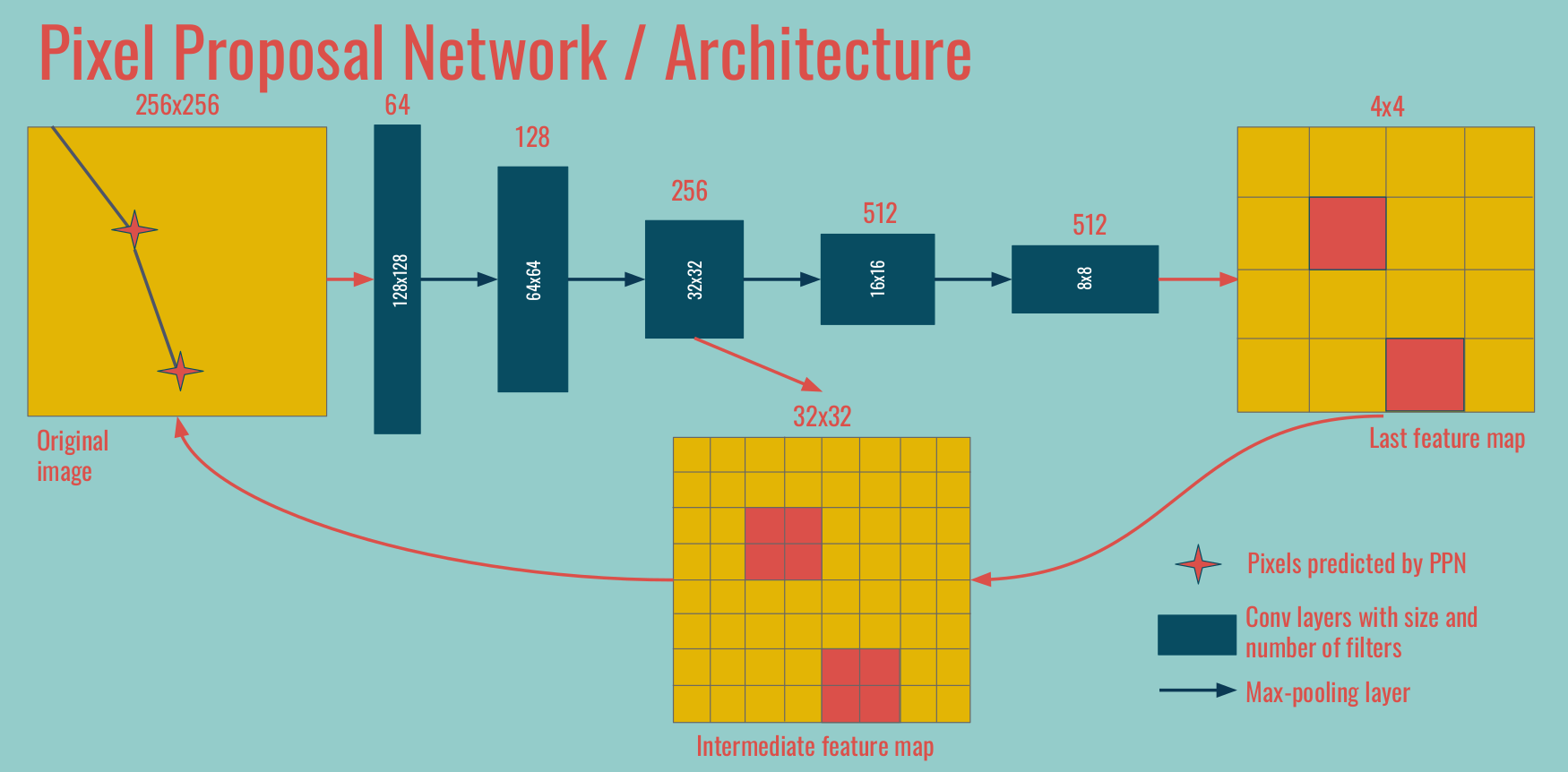
Jargon We call PPN1 the deepest feature map / convolutions, at the coarsest spatial resolution. In the example above, the 4x4 feature map on the right. We call PPN2 the operations on the intermediate level, in between the coarsest and original spatial resolutions. Occasionally PPN3 refers to operations done at the original spatial size.
0. Setup¶
First you should load your own version of lartpc_mlreco3d code (change the path):
import sys
sys.path.append("/u/ki/ldomine/lartpc_mlreco3d/")
We import useful libraries like NumPy, Seaborn, and Plotly, as well as useful functions from the lartpc_mlreco3d code.
import numpy as np
import matplotlib
from matplotlib import pyplot as plt
import seaborn
import scipy
import yaml
import plotly.graph_objs as go
from plotly.offline import iplot, init_notebook_mode
init_notebook_mode(connected=False)
from mlreco.utils.ppn import uresnet_ppn_type_point_selector, uresnet_ppn_point_selector
from mlreco.main_funcs import process_config, prepare
from mlreco.visualization import scatter_points, scatter_cubes, plotly_layout3d
1. Configuration and inference¶
First we define the configuration of the network and load the weights. I will not comment more on the details of this config file as it has already been done. The keys specific to PPN are in the ppn section:
downsample_ghostppn_num_convtrue_distance_ppn1,true_distance_ppn2andtrue_distance_ppn3score_threshold
cfg = '''
iotool:
batch_size: 64
minibatch_size: 64
shuffle: False
num_workers: 1
collate_fn: CollateSparse
dataset:
name: LArCVDataset
data_keys:
- /gpfs/slac/staas/fs1/g/neutrino/ldomine/icarus_workshop_data/icarus_test*.root
limit_num_files: 20
schema:
input_data:
- parse_sparse3d_scn
- sparse3d_reco
# - sparse3d_reco_inv_chi2
# - sparse3d_reco_hit_charge0
# - sparse3d_reco_hit_charge1
# - sparse3d_reco_hit_charge2
# - sparse3d_reco_hit_rms0
# - sparse3d_reco_hit_rms1
# - sparse3d_reco_hit_rms2
# - sparse3d_reco_hit_time0
# - sparse3d_reco_hit_time1
# - sparse3d_reco_hit_time2
# - sparse3d_reco_occupancy
ghost_label:
- parse_sparse3d_scn
- sparse3d_fivetypes_reco
point_label:
- parse_particle_points
- sparse3d_reco
- particle_mcst
model:
name: uresnet_ppn_chain
modules:
uresnet_lonely:
num_strides: 5
filters: 16
num_classes: 5
data_dim: 3
spatial_size: 768
ghost: True
features: 1
model_path: '/gpfs/slac/staas/fs1/g/neutrino/ldomine/pi0_workshop_train/weights_ppn18/snapshot-5699.ckpt'
ppn:
num_strides: 5
filters: 16
num_classes: 5
data_dim: 3
downsample_ghost: True
ppn_num_conv: 3
true_distance_ppn1: 1.0
true_distance_ppn2: 2.0
true_distance_ppn3: 5.0
use_encoding: False
ppn1_size: 48
ppn2_size: 192
spatial_size: 768
model_path: '/gpfs/slac/staas/fs1/g/neutrino/ldomine/pi0_workshop_train/weights_ppn18/snapshot-5699.ckpt'
network_input:
- input_data
- point_label
loss_input:
- ghost_label
- point_label
trainval:
seed: 123
learning_rate: 0.001
unwrapper: unwrap_3d_scn
gpus: ''
weight_prefix: weights_trash/snapshot
iterations: 10
report_step: 1
checkpoint_step: 500
log_dir: log_trash
model_path: '/gpfs/slac/staas/fs1/g/neutrino/ldomine/pi0_workshop_train/weights_ppn18/snapshot-5699.ckpt'
train: False
debug: False
'''
cfg = yaml.load(cfg,Loader=yaml.Loader)
# pre-process configuration (checks + certain non-specified default settings)
process_config(cfg)
# prepare function configures necessary "handlers"
handlers = prepare(cfg)
Now we are ready to run the inference for one batch.
data, output = handlers.trainer.forward(handlers.data_io_iter)
2. Visualize input¶
Let's visualize some of the results. For that we pick one event for example:
entry = 7
We can extract all necessary information from the original data (data) and the results of the inference (output).
# XYZ and "charge"
edep = data['input_data'][entry]
x, y, z, energy = edep[:, 0], edep[:, 1], edep[:, 2], edep[:, 4]
# Semantics
# 0,1,2,3,4 = true points with 5 semantic classes
# 5 = ghost points
label_semantic = data['ghost_label'][entry][:, -1]
pred_semantic = np.argmax(output['segmentation'][entry], axis=1)
pred_ghost = np.argmax(output['ghost'][entry], axis=1) # 0 = nonghost, 1 = ghost
pred_nonghost_mask = pred_ghost == 0
true_nonghost_mask = label_semantic < 5
# Points
true_points = data['point_label'][entry]
pred_points = output['points'][entry]
Energy deposits with and without showing (true) ghost points¶
trace = scatter_points(edep, markersize=1, color=edep[:, 4], colorscale='Jet')
fig = go.Figure(data=trace,layout=plotly_layout3d())
iplot(fig)
trace = scatter_points(edep[true_nonghost_mask], markersize=1, color=edep[true_nonghost_mask][:, 4], colorscale='Jet')
fig = go.Figure(data=trace,layout=plotly_layout3d())
iplot(fig)
True labels without showing ghost points¶
Each voxel color corresponds to one of the five semantic classes: HIP, MIP, EM shower, delta ray, Michel electron. In addition each PPN true point has a corresponding true type among these 5 types.
trace_truth = scatter_points(edep[true_nonghost_mask], markersize=1, color=label_semantic[true_nonghost_mask], colorscale='Portland', cmin=0, cmax=4)
trace_points = scatter_points(true_points, markersize=5, color=true_points[:, -1], colorscale='Portland', cmin=0, cmax=4)
fig = go.Figure(data=trace_truth + trace_points,layout=plotly_layout3d())
iplot(fig)
3. Visualize predictions¶
The raw output of PPN is a bit messy: there is one point predicted for each nonzero voxel, along with a score and a type prediction. We have to use the predicted masks at different spatial sizes and the scores to do some postprocessing. This is done in the function uresnet_ppn_type_point_selector if you want to rely on the point type predictions, or uresnet_ppn_point_selector otherwise. There are a few parameters that you can tweak:
score_thresholdis a threshold on the score predicted for each point by PPNtype_thresholdis a distance threshold enforcing closeness between points of (predicted) type X and voxels of (predicted) type X.nms_score_thresholdis a threshold for the overlap computed in NMS algorithm (higher threshold means less points removed)window_sizeis the size used in NMS algorithm to define a square window around each predicted point.
ppn = uresnet_ppn_type_point_selector(edep, output, entry=entry, score_threshold=0.2, type_threshold=2)
#ppn = uresnet_ppn_point_selector(edep, output, entry=entry, score_threshold=0.0, nms_score_threshold=0.8, window_size=2)
print(ppn.shape)
ppn_voxels = ppn[:, :3]
ppn_type = ppn[:, -1]
#ppn_scores = ppn_type#np.zeros_like(ppn_type)
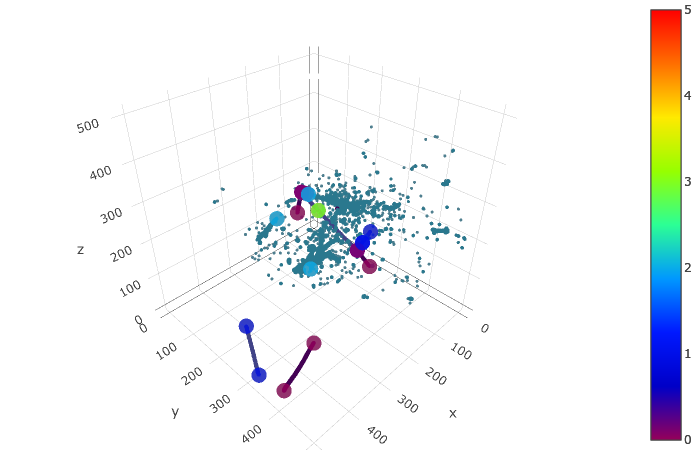
Predictions (semantic predictions, for predicted nonghost points)¶
trace_pred = scatter_points(edep[pred_nonghost_mask], markersize=1, color=pred_semantic[pred_nonghost_mask], colorscale='Portland', cmin=0, cmax=4)
trace_points = scatter_points(ppn_voxels, markersize=5, color=ppn_type, colorscale='Portland', cmin=0, cmax=4)
# Do not display type
# trace_points = scatter_points(ppn_voxels, markersize=5, color='orange')
# Display true points as well
# trace_points_true = scatter_points(true_points, markersize=5, color='green')
fig = go.Figure(data=trace_pred + trace_points,layout=plotly_layout3d())
iplot(fig)
4. Metrics¶
We loop over the batch computing pairwise distances to produce some useful metrics. Again feel free to chose whichever postprocessing method you prefer (uresnet_ppn_type_point_selector, uresnet_ppn_point_selector or your own custom function).
from scipy.spatial.distance import cdist
seaborn.set(rc={
'figure.figsize':(15, 10),
})
seaborn.set_context('talk') # or paper
# For each true point, record the distance to the closest predicted point
closest_ppn_point = []
# For each predicted point, record the distance to the closest true point
closest_true_point = []
# For each true point, record the distance to the closest edep left after deghosting
closest_deghosted_edep = []
true_types = []
pred_types = []
for entry in range(cfg['iotool']['batch_size']):
true_points = data['point_label'][entry]
edep = data['input_data'][entry]
pred_nonghost_mask = np.argmax(output['ghost'][entry], axis=1) == 0
# --- Choose your postprocessing function here ---
ppn = uresnet_ppn_type_point_selector(edep, output, entry=entry, score_threshold=0.2, type_threshold=2)
# ppn = uresnet_ppn_point_selector(edep, output, entry=entry, score_threshold=0.2, nms_score_threshold=0.8, window_size=2)
ppn_voxels = ppn[:, :3]
if ppn_voxels.shape[0] > 0:
distances = cdist(true_points[:, :3], ppn_voxels)
if distances.shape[1] > 0:
closest_ppn_point.extend(distances.min(axis=1))
if distances.shape[0] > 0:
closest_true_point.extend(distances.min(axis=0))
d = cdist(true_points[:, :3], edep[pred_nonghost_mask][:, :3])
closest_deghosted_edep.extend(d.min(axis=1))
true_types.extend(true_points[:, -1])
pred_types.extend(ppn[:, -1])
closest_ppn_point = np.array(closest_ppn_point)
closest_true_point = np.array(closest_true_point)
closest_deghosted_edep = np.array(closest_deghosted_edep)
true_types = np.array(true_types)
pred_types = np.array(pred_types)
print(true_types.shape, closest_ppn_point.shape)
4.1 Distance from true points to the closest predicted point¶
boundary = 100
fraction = (closest_ppn_point>boundary).sum() / float(len(closest_ppn_point))
print('Fraction of true points at a distance > %dpx of any PPN point:' % boundary, fraction)
fraction2 = (closest_deghosted_edep>boundary).sum() / float(len(closest_deghosted_edep))
print('Fraction of true points at a distance > %dpx of any point after deghosting: ' % boundary, fraction2)
plt.hist(closest_ppn_point, range=[0, boundary], bins=20)
plt.xlabel('Distance to closest PPN point (px)')
plt.ylabel('True points')

4.2 Distance from predicted points to the closest true point¶
boundary = 100
fraction = (closest_true_point>boundary).sum() / float(len(closest_true_point))
print('Fraction of predicted points at a distance >%dpx of any true point: ' % boundary, fraction)
plt.hist(closest_true_point, range=[0, boundary], bins=20)
plt.xlabel('Distance to closest true point (px)')
plt.ylabel('Predicted PPN points')

4.3 Shower starting points¶
boundary = 20
shower_mask = true_types == 2
x = shower_mask.astype(int).sum()/float(shower_mask.shape[0])
print('Looking at points for true showers only, ie %f of true points' % x)
fraction = (closest_ppn_point[shower_mask]>boundary).sum() / float(len(closest_ppn_point[shower_mask]))
print('Fraction of true points at a distance > %dpx of any PPN point:' % boundary, fraction)
fraction2 = (closest_deghosted_edep[shower_mask]>boundary).sum() / float(len(closest_deghosted_edep[shower_mask]))
print('Fraction of true points at a distance > %dpx of any point after deghosting: ' % boundary, fraction2)
plt.hist(closest_ppn_point[shower_mask], range=[0, boundary], bins=20)
plt.xlabel('Distance to closest PPN point (px)')
plt.ylabel('True points')

# import mlreco
# import importlib
# importlib.reload(mlreco.utils.ppn)