Real-world scenes, such as those in ScanNet, are difficult to
capture, with highly limited data available. Generating realistic
scenes with varied object poses remains an open and challenging
task. In this work, we propose FactoredScenes, a framework that
synthesizes realistic 3D scenes by leveraging the underlying
structure of rooms while learning the variation of object poses
from lived-in scenes. We introduce a factored representation that
decomposes scenes into hierarchically organized concepts of room
programs and object poses. To encode structure, FactoredScenes
learns a library of functions capturing reusable layout patterns
from which scenes are drawn, then uses large language models to
generate high-level programs, regularized by the learned library.
To represent scene variations, FactoredScenes learns a
program-conditioned model to hierarchically predict object poses,
and retrieves and places 3D objects in a scene. We show that
FactoredScenes generates realistic, real-world rooms that are
difficult to distinguish from real ScanNet scenes.
How can we learn to generate realistic scenes from limited data?
Our key insight is that, despite inherent noisiness, indoor
scenes retain significant underlying structure based on how
rooms were intentionally designed, following social norms and
preferences. Chairs are grouped around tables, and coffee tables
are positioned by couches. We propose to leverage this (hidden)
structure by first generating programmatic layouts that align
with the foundational design of rooms, then modeling the
realistic variation of lived-in scenes through a pose prediction
model for orienting objects in the room. Our goal is to
synthesize ScanNet-like data with diverse room layouts and
object poses.
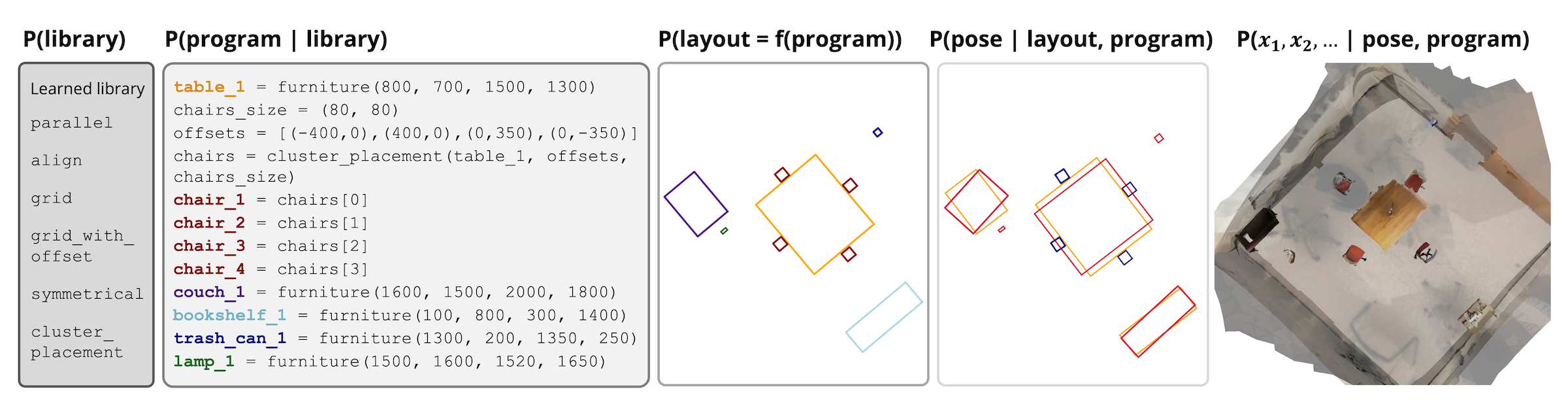
To this end, we introduce FactoredScenes, a framework that uses
a factored representation to represent a scene. We
decompose complex scene generation into five steps:
(i) learn a library of programs that capture room
structures,
(ii) generate a scene program using LLMs and the learned
library,
(iii) execute the program to retrieve axis-aligned
layouts,
(iv) predict object poses with a program-conditioned model,
and
(v) retrieve object instances based on program structure and
predicted dimensions.
Notably, such decomposition of a room into hierarchical concepts
eliminates the need to directly generate a room sampled from the
full scene distribution, learned solely from ScanNet data.
Instead, this approach enables FactoredScenes to leverage
different data sources and methods to model different components
of scenes' structure—effectively bootstrapping learning of the
full scene distribution despite limited real-world data.
Importantly, this modular design is made possible due to the
appropriate levels of abstraction that enable interface between
each component. Semantic knowledge from LLMs is distilled into
programs, regularized by learned libraries, which operate on
text-parameterized objects, with numeric values predicted by
neural networks.
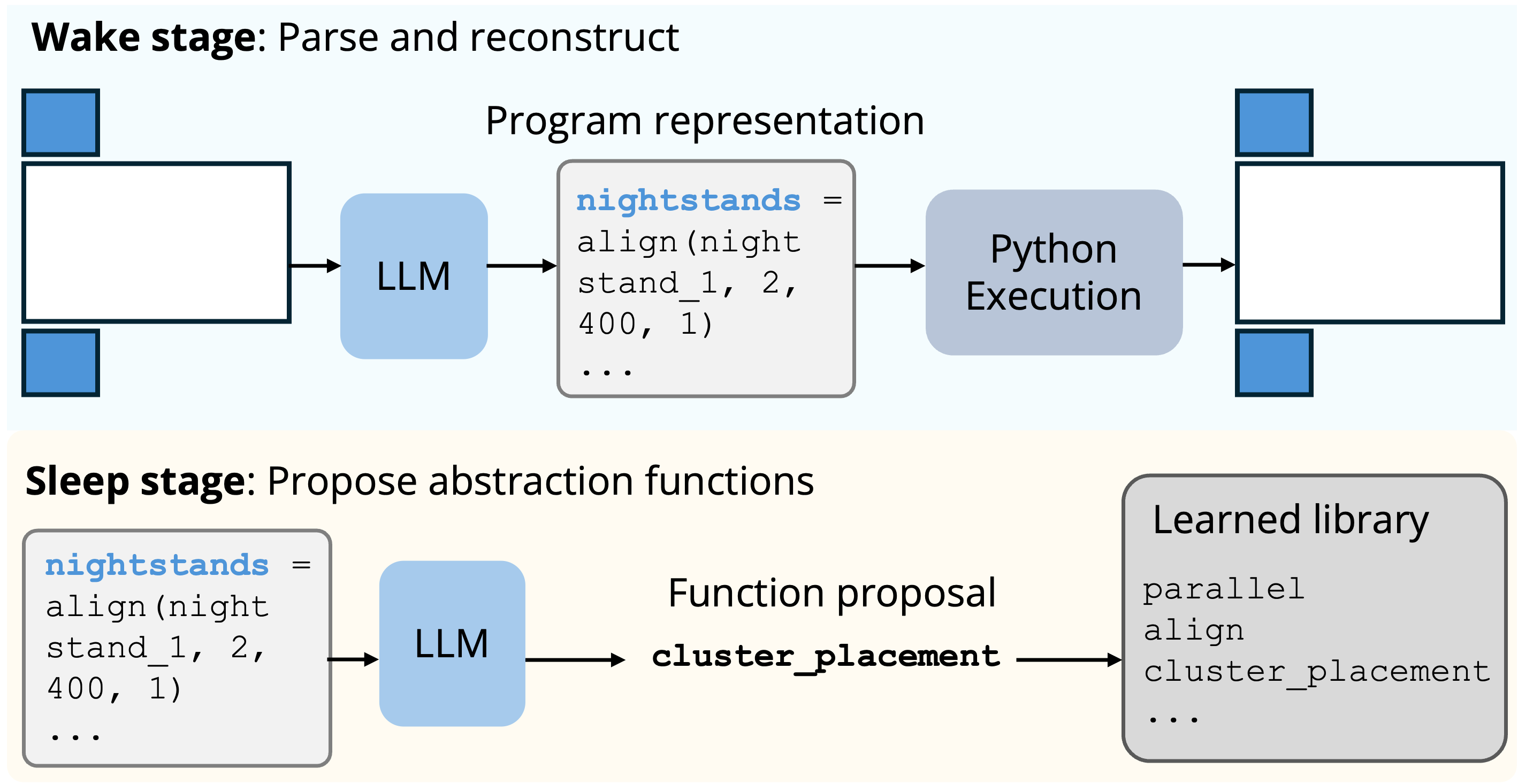
Our framework first learns a space of programs that can generate room layouts from 3D-Front, a large-scale dataset of synthetic indoor scenes that are professionally designed. We use this dataset to learn a library of reusable programs that captures room structure patterns. FactoredScenes then leverages the generalization capabilities of large language models to create diverse new layouts, guided by our learned library. We demonstrate that this library learning step is essential in capturing structural relationships between objects in rooms, as opposed to relying solely on an inference-based library that has never seen example scenes.
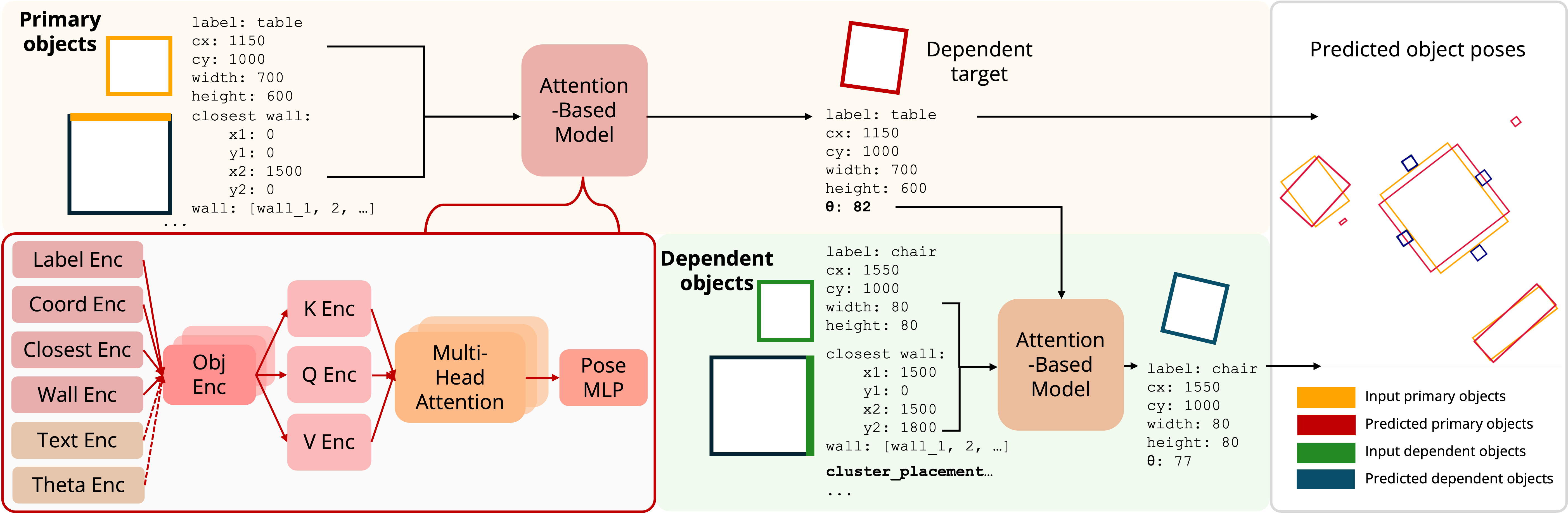
Given the program and generated layout, FactoredScenes learns to predict object poses, using a much smaller ScanNet dataset. Here, the layout program serves as a form of regularization, enabling effective learning from (very) limited real-world data. FactoredScenes's object pose model orients bounding boxes hierarchically given this program. It first predicts poses of primary objects (e.g., a table), and then predicts that of dependent objects (e.g., chairs grouped around the table) based on primary pose predictions. Finally, FactoredScenes retrieves object instances based on their predicted dimensions, completing the full 3D scene.
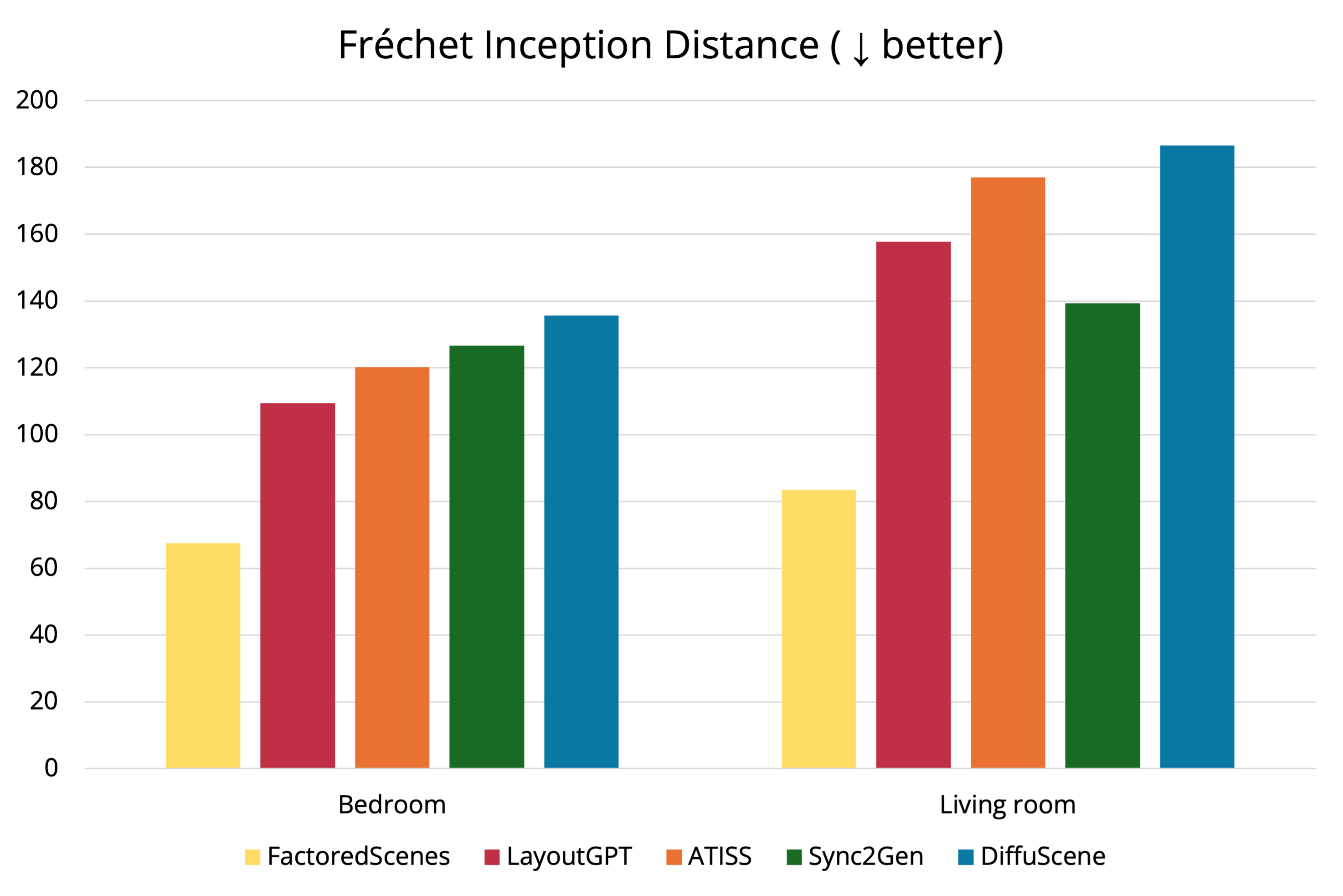
FactoredScenes demonstrates significant improvements over prior work in generating realistic ScanNet oriented layouts by FID and KID metrics. We also quantitatively evaluate our learned library's ability to compress room structure compared to an inference-only library, and see a 644.1% relative improvement in function use. In addition, we evaluate our object pose model's performance, which shows a 11.4% relative improvement in prediction of dependent object poses. Finally, we conduct a human study comparing FactoredScenes's rooms to real ScanNet rooms, and demonstrate that our generated 3D scenes are difficult for humans to distinguish from real scenes. We believe that FactoredScenes is a step toward realistic, real-world scene generation from programs to poses.
Below, we render diverse examples of FactoredScenes's generated 3D scenes with annotated ScanNet (top row) and ShapeNet (bottom row) objects. Note that ScanNet objects are often partial, hence we include a scaled and interpolated ScanNet background for visualization.

We release code for FactoredScenes here. Thanks!