The parallelization of the time-loop of a partial differential
equation solver, or time-parallelism, has in general received little
attention in the literature compared to the parallelization of its
space-loop. This is because time-parallelism --- where the solution
is computed simultaneously at different time-instances --- is harder
to achieve efficiently than space-parallelism, due to the inherently
sequential nature of the time-integration process. However,
time-parallelism can be of paramount importance to many applications.
These include those time-dependent problems where the underlying
computational models have either very few spatial degrees of freedom
(dof) to enable any significant amount of space-parallelism, or not
enough spatial dof to efficiently exploit a given large number of
processors. Problems in robotics and protein folding, and more
generally, time-dependent problems arising from reduced-order models
usually fall in the first category. Many structural dynamics problems,
even those with hundreds of thousands of dof, can fall in the second
category when massively parallel computations are desired.
Accelerating the time-to-solution of the first category of problems is
crucial for real-time or near-real-time applications, and
time-parallelism can be a key factor for achieving this objective.
With the advent of massively parallel systems with thousands of cores,
time-parallelism also provides a venue for reducing the
time-to-solution of fixed size problems of the second category below
the minimum attainable using space-parallelism alone on such systems.
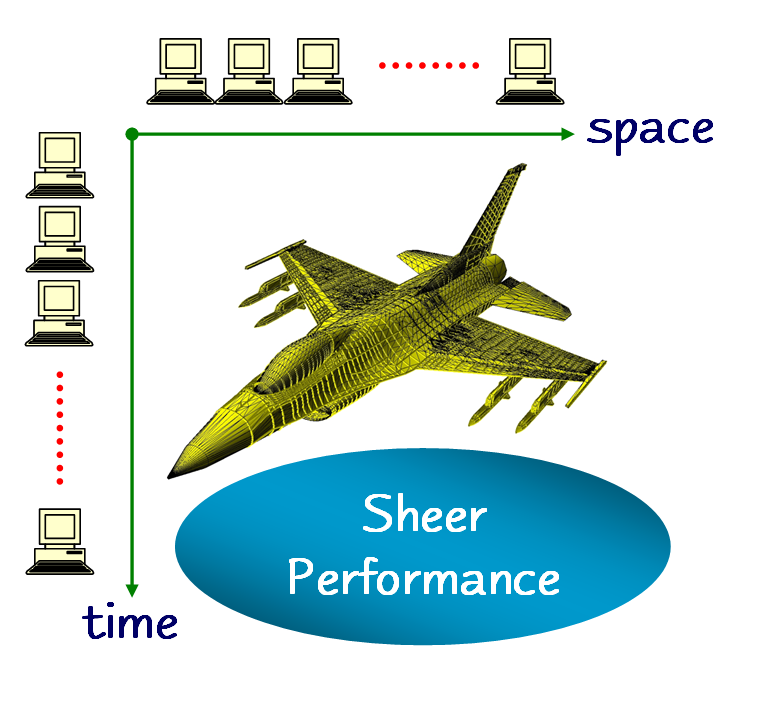
To achieve the aforementioned objective, the Parallel-In-Time
Algorithm (or PITA) relies on classical domain decomposition principles
that are usually applied to the spatial component of a PDE. The
time-domain is first divided into time-slices to be processed
independently. This decomposition can also be seen as defining a
coarse time-grid as opposed to the underlying fine time-grid, chosen
such as to allow convergence with the sought-after accuracy. Starting
with initial approximate seed values defined on the coarse time-grid,
the system evolution is then independently computed on each time-slice
using a classical time-stepping integrator. This solution exhibits
discontinuities or jumps at the time-slice boundaries if the initial
guess is not accurate enough. Applying a Newton-like approach to the
global time-dependent equation, a correction function is then computed
so that its values on the coarse time-grid are added to the current
seeds to improve their accuracy. The solution can thus be iteratively
refined until convergence, which can be monitored by the reduction of
the jumps.
|
While most steps of this iteration process are naturally parallel, the
key challenge is to perform efficiently the sequential correction
computation. For structural dynamics the best strategy consists in
propagating only a relevant part of the jump on the fine time-grid
while retaining an acceptable computational efficiency. Typically
speed-up factors of 3 or more can be achieved for both linear and
non-linear dynamics problems.
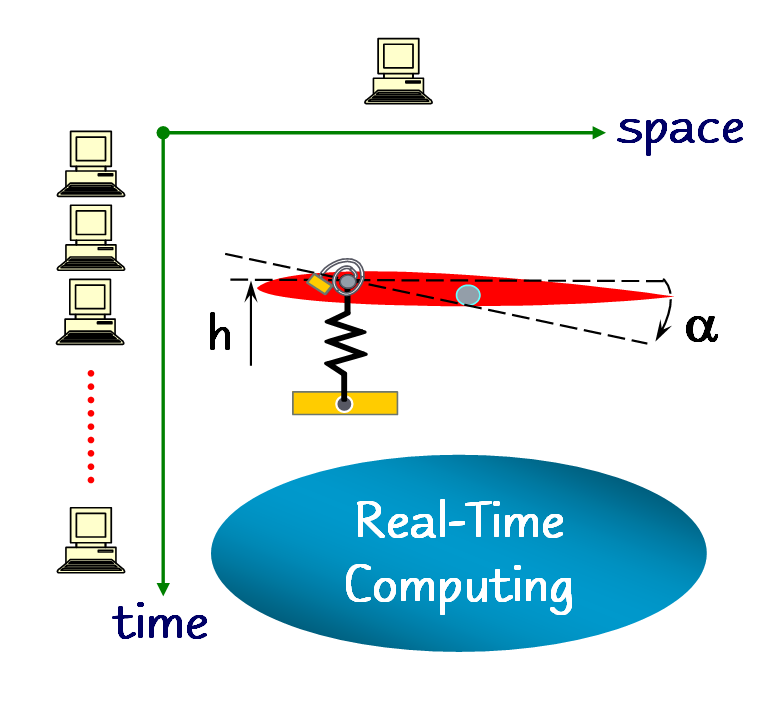 |
| Figure 2: Second time-parallel strategy for large-scale systems and reduced-order models. |
|